Mis Proyectos
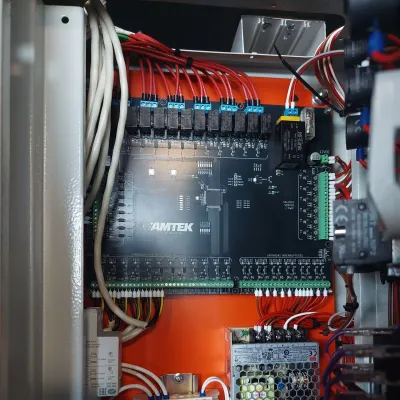
Desarrollo de un controlador a medida para una máquina bobinadora, destacando por su firmware con control de movimiento trapezoidal y una librería de display no bloqueante.

Diseño e implementación de un controlador FOC para motores brushless como proyecto de título, materializando el objetivo que me impulsó a estudiar Ingeniería en Electrónica.

Culminación de años de desarrollo al competir en la "All Japan Micromouse Contest", llevando nuestro diseño con turbina al más alto nivel internacional en Tokio.
Desarrollo de un sistema de control a medida para dos mesones levadizos, implementado en un espacio de cowork en la Torre Costanera, Santiago.

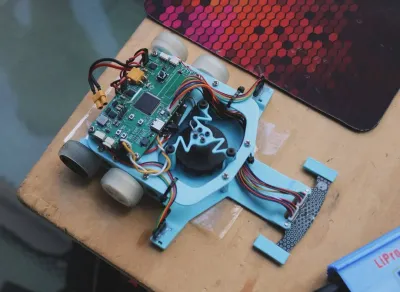
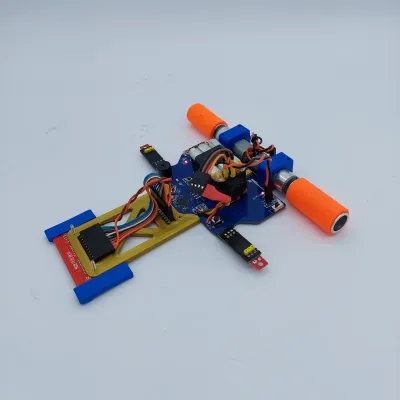
Obtención del segundo lugar en la All Chile Robot Contest con una versión más ligera y ágil del robot, optimizada con dos motores coreless de alto rendimiento.
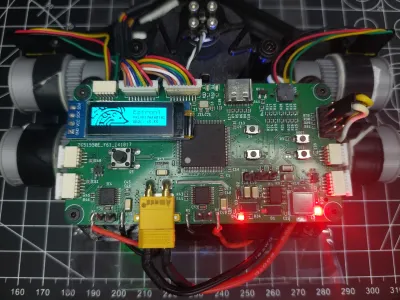
Doble primer lugar en la BRC 2024 (categorías Estudiantes y Open) gracias a un rediseño radical que incluyó un microcontrolador STM32H7 y un sensor personalizado de 12 canales.

Diseño de un sensor infrarrojo personalizado con 12 canales en disposición de arco, creado para mejorar la detección de línea en robots seguidores de línea.

Diseño de una mini PCB de 17x15mm para el encoder AS5047P, optimizada para la integración rápida en proyectos de robótica.
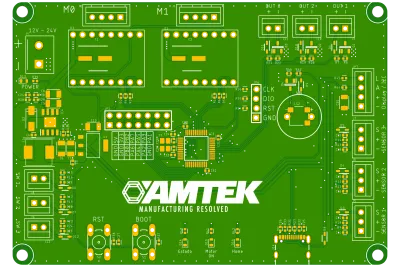
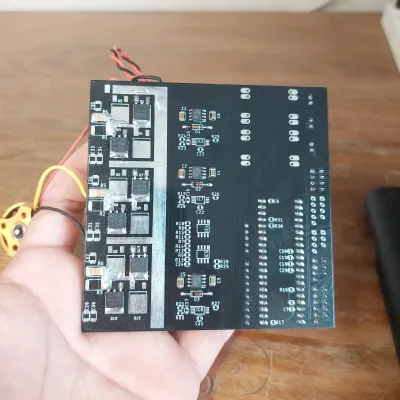
El cerebro de la última generación de robotracers: una PCB 'All-in-One' diseñada a medida con un microcontrolador STM32H7 de alto rendimiento y periféricos optimizados para la competencia.
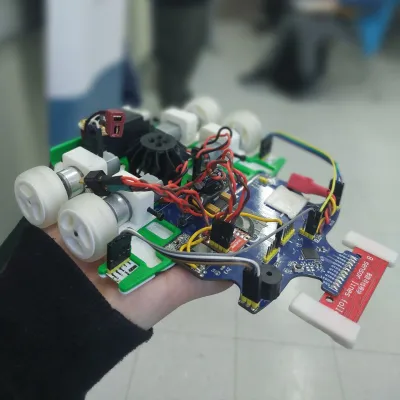
Primer lugar en la All Chile Robot Contest y clasificación a Japón con "Verstappen", el primer robot en Chile con una turbina de succión para generar efecto suelo.

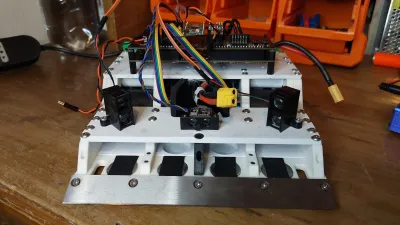
Diseño y fabricación de un robot Mega Sumo con chasis de aluminio CNC y control FOC, representando a Chile en la "All Japan Robot-Sumo Tournament" de 2023.
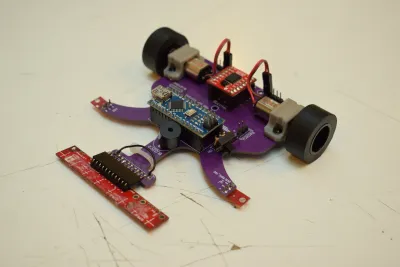
Primer robotracer con hardware 100% propio: una PCB con STM32 y componentes SMD integrados que sentó las bases técnicas para futuros éxitos a pesar de un fallo inducido por el entorno.
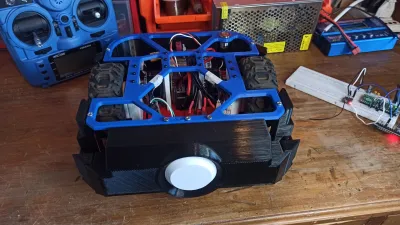
La fase de prototipado crucial para 'Asura Kabuto', donde se validó el diseño mecánico y la integración de la ODrive mediante 4 iteraciones impresas en 3D.
El prototipo clave que integró un microcontrolador STM32 y sensores de corriente, permitiendo las primeras pruebas del algoritmo FOC antes de una falla que inspiró el diseño definitivo.
Desarrollo de un robot de combate para la BRC 2022, aplicando por primera vez el control FOC en un entorno destructivo con una estructura mixta de aluminio y piezas 3D.
Obtención del segundo lugar en la All Chile Robot Contest tras superar un fallo crítico de hardware, reconstruyendo el robot desde cero en minutos durante la competencia.

Diseño y fabricación de un módulo reutilizable que invierte señales lógicas TTL, solucionando la incompatibilidad de comunicación con protocolos como S.BUS de FrSky.
Desarrollo de un robot experimental para el "Rodeo de Robótica", siendo mi primera plataforma para probar y entender la tecnología de control de motores FOC con una Odrive 3.6.

Primer prototipo de torreta RC para un vehículo de airsoft, centrado en el control de servos y la integración con un sistema FPV, que culminó en un valioso aprendizaje tras una falla en campo.
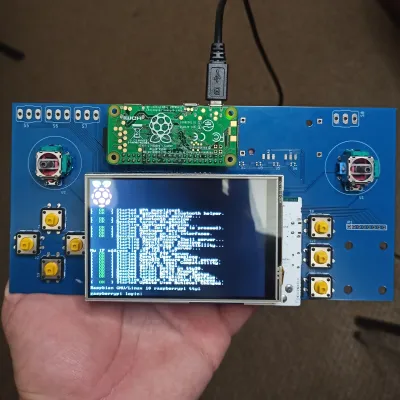
Diseño de un joystick a medida para el robot Hexapod, uno de mis primeros proyectos de PCB que integró un Arduino Due y una Raspberry Pi Zero en una sola placa.
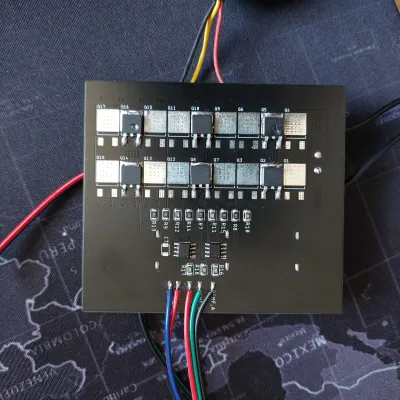
El primer driver fabricado profesionalmente. Un salto en calidad que trajo consigo una lección fundamental y costosa sobre el 'dead time' en la conmutación de MOSFETs.
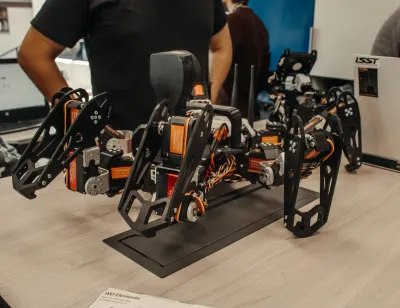
Un proyecto personal de 8 meses que integra diseño mecánico 3D, desarrollo de PCBs personalizadas y la programación de cinemática inversa en Python para controlar un avanzado robot de 18 servos.
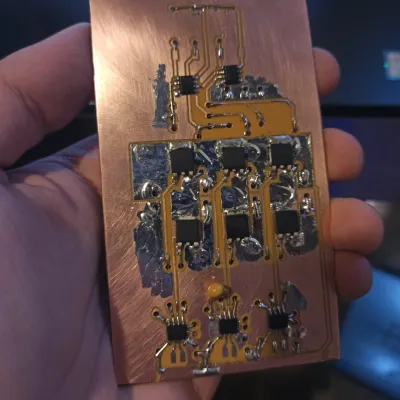
El punto de partida: un driver de motores fabricado artesanalmente con ácido para materializar los primeros conceptos de electrónica de potencia.

Primera participación en la "All Japan Robot-Sumo Tournament" en Tokio. Una experiencia fundamental para analizar el estado del arte y definir la hoja de ruta tecnológica para futuros desarrollos.

Primer lugar en Mega Sumo Autónomo en la UTFSM, logrando la clasificación a Japón con un robot basado en motores brushless y sentando las bases de mi futuro proyecto de título.
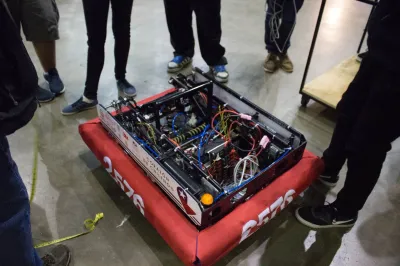
Mi debut en la robótica competitiva internacional con el equipo "Corazón de Chile". Como miembro de la división de electrónica.