Robotracer V2 - El Salto a STM32
Sobre este proyecto
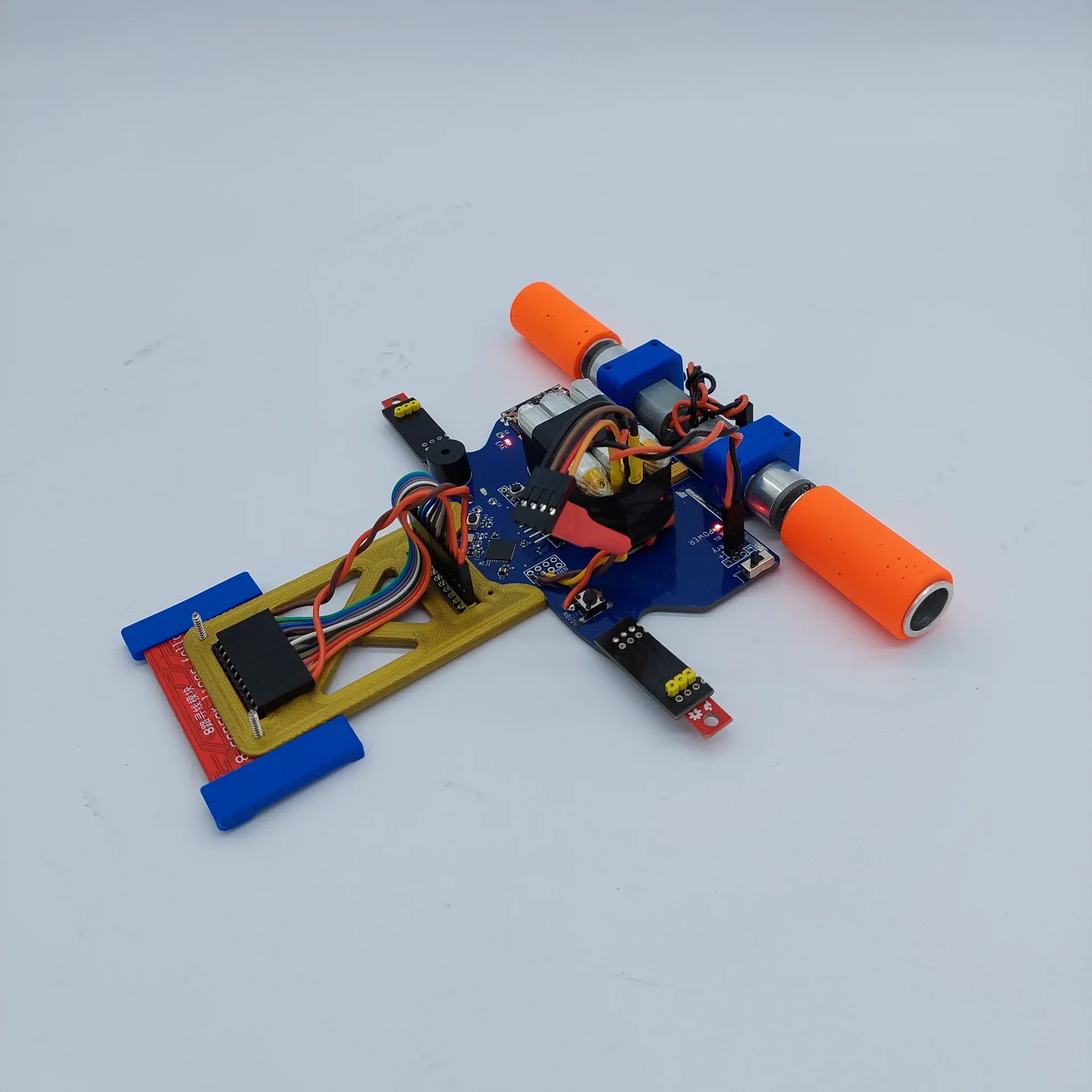
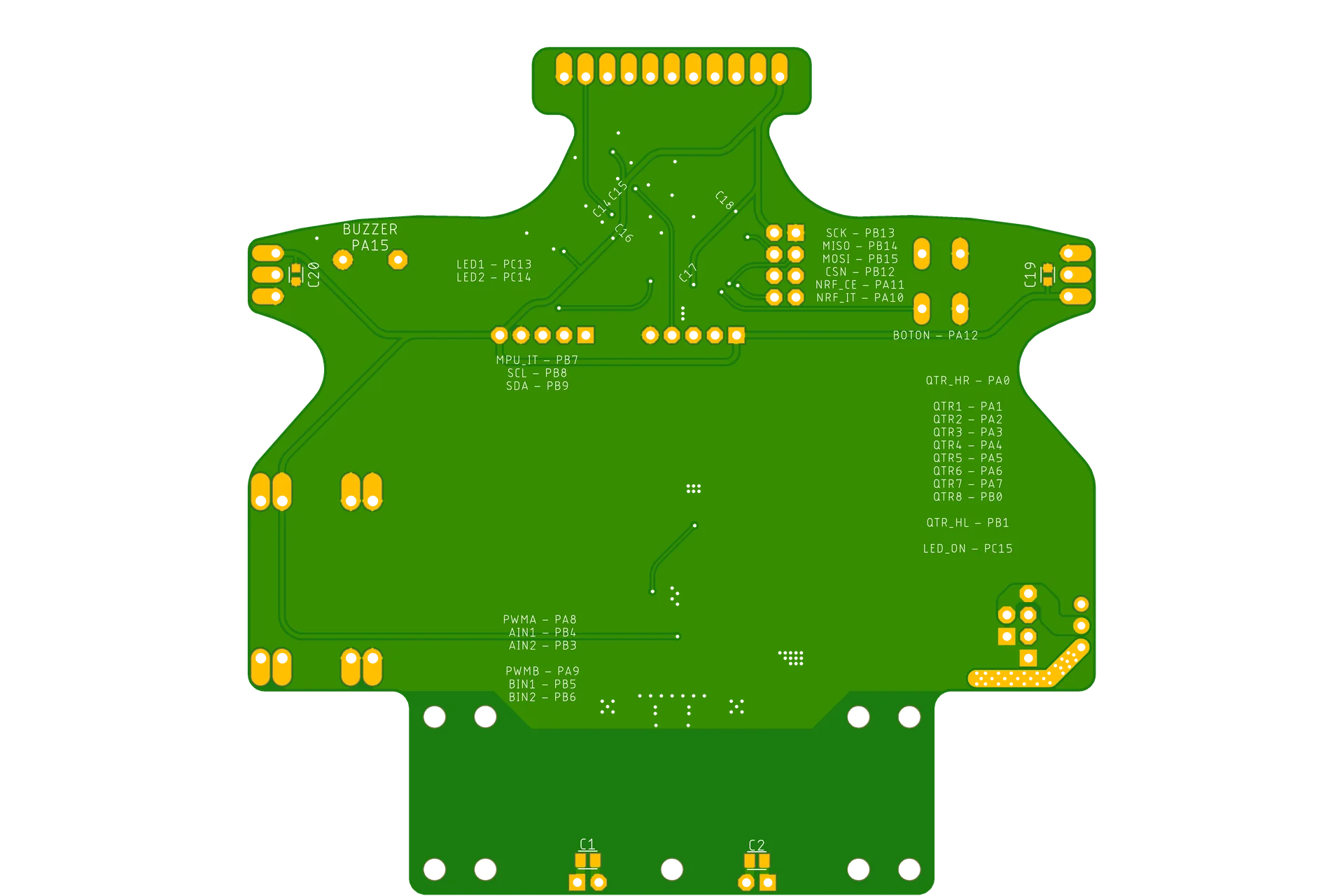
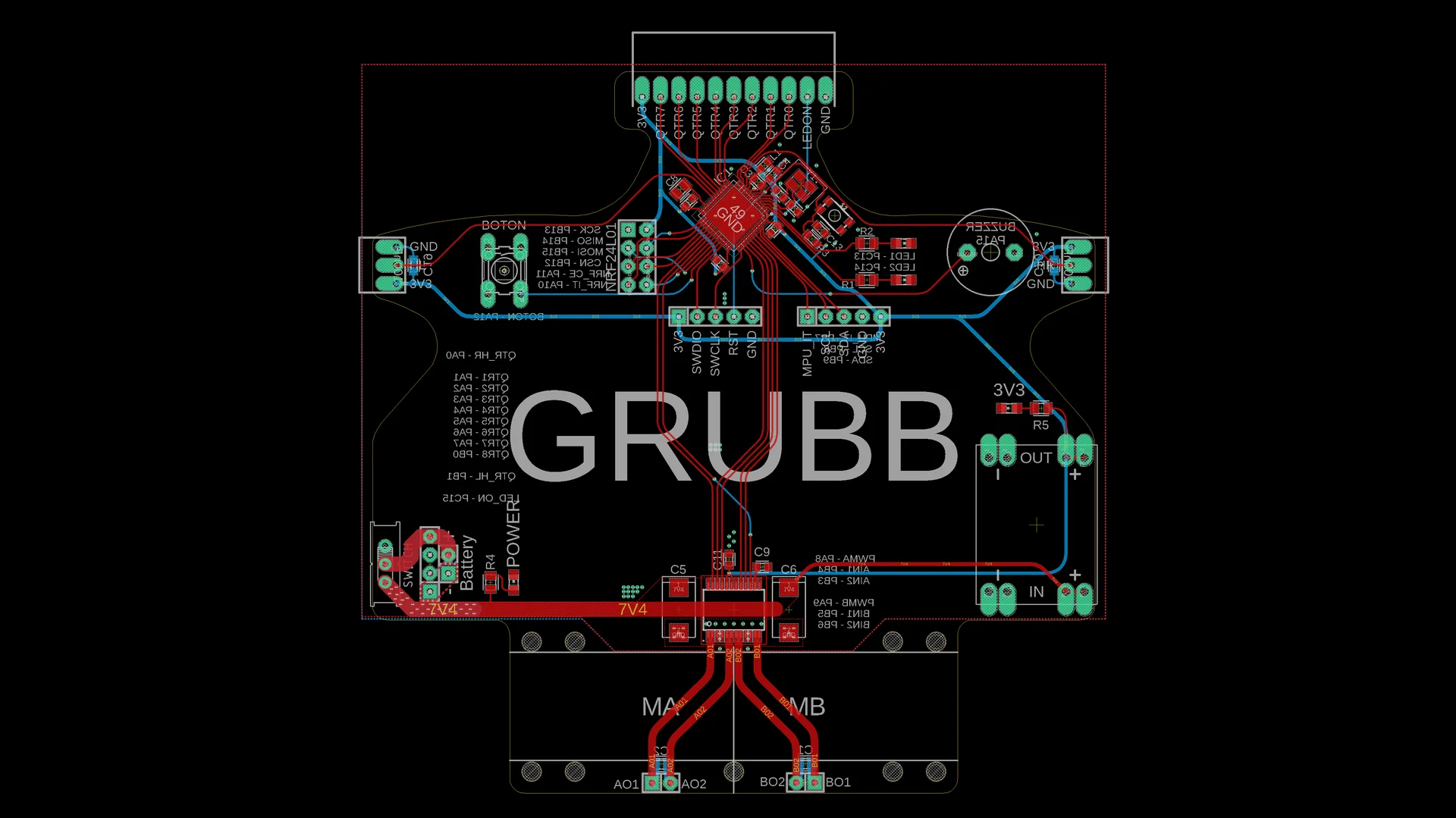
Este proyecto representó un salto cualitativo, evolucionando desde plataformas basadas en módulos. Fue el primer seguidor de línea en el que diseñé una PCB personalizada que integraba el microcontrolador (STM32) y el driver de motores directamente soldados (SMD).
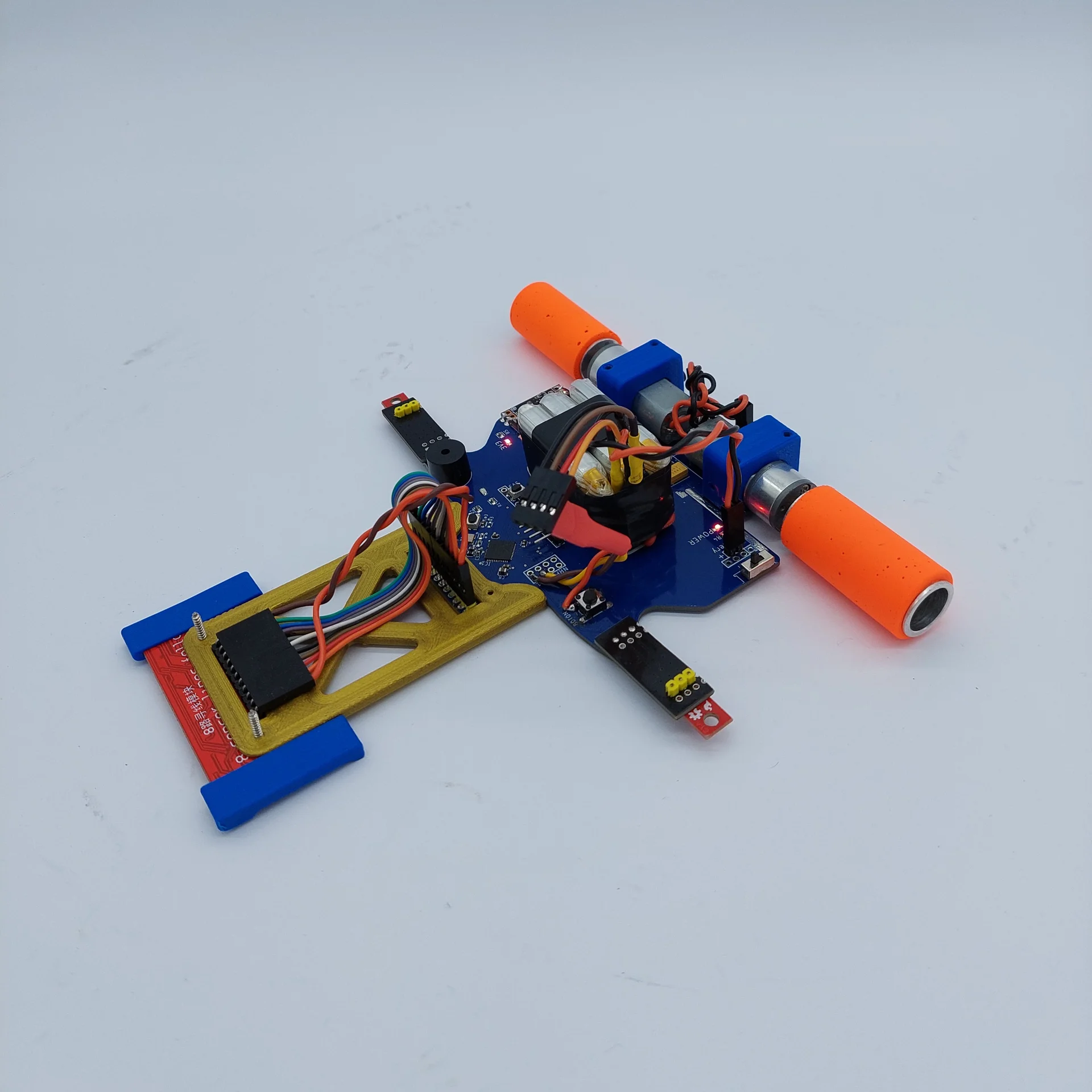
El hardware se potenció con componentes de alto rendimiento, como motores JSumo y ruedas de silicona de alta adherencia, dándonos una clara ventaja mecánica. El robot era visiblemente más rápido que sus competidores.
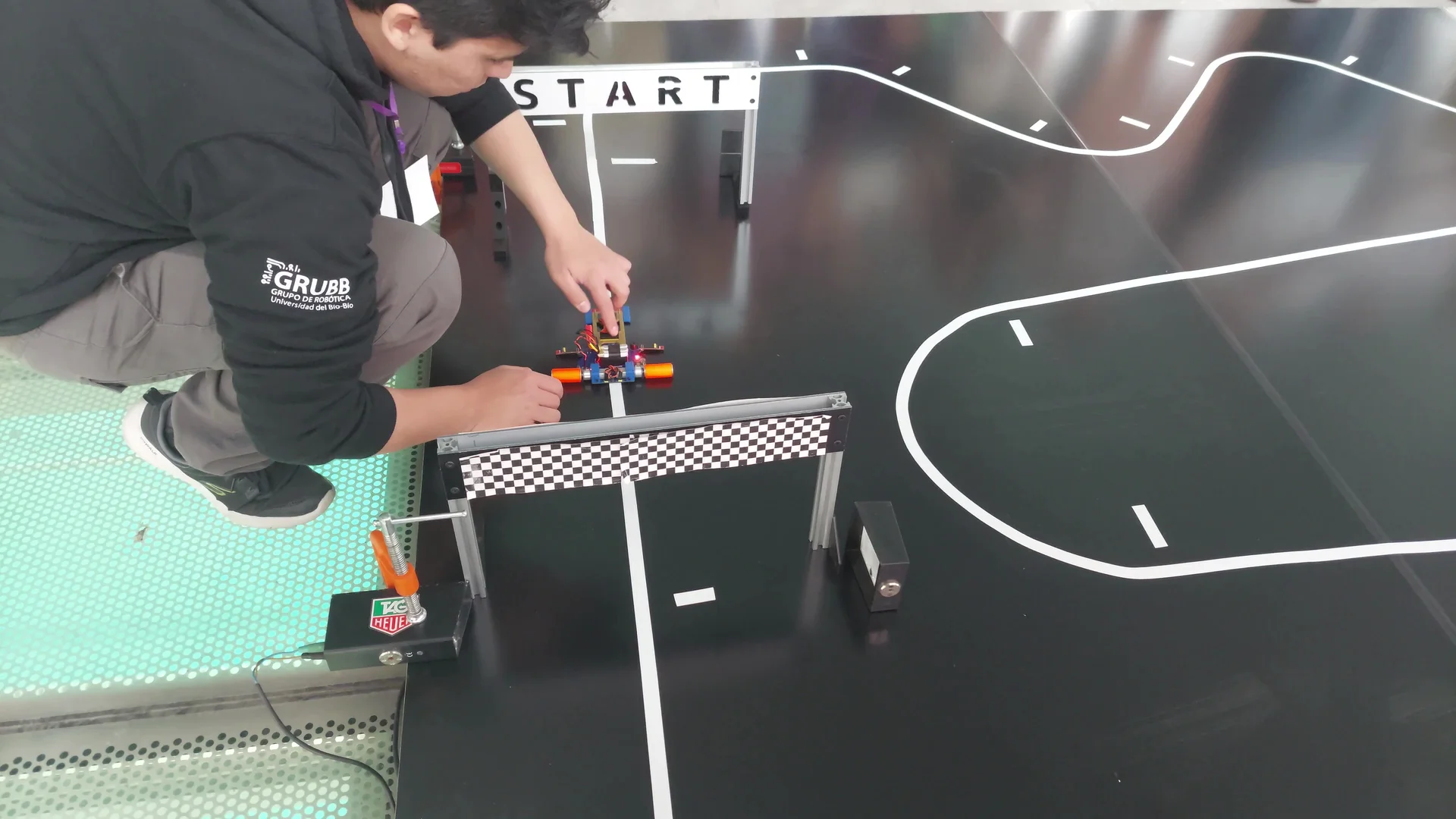
Durante la competencia, un entorno imprevisto —una pista con superficie de aluminio fuera de reglamento— generó descargas electrostáticas (ESD) que dañaron la electrónica. A pesar de no poder completar la carrera, la experiencia validó el potencial del diseño y proporcionó un aprendizaje crucial sobre la necesidad de protecciones robustas.
Características Clave
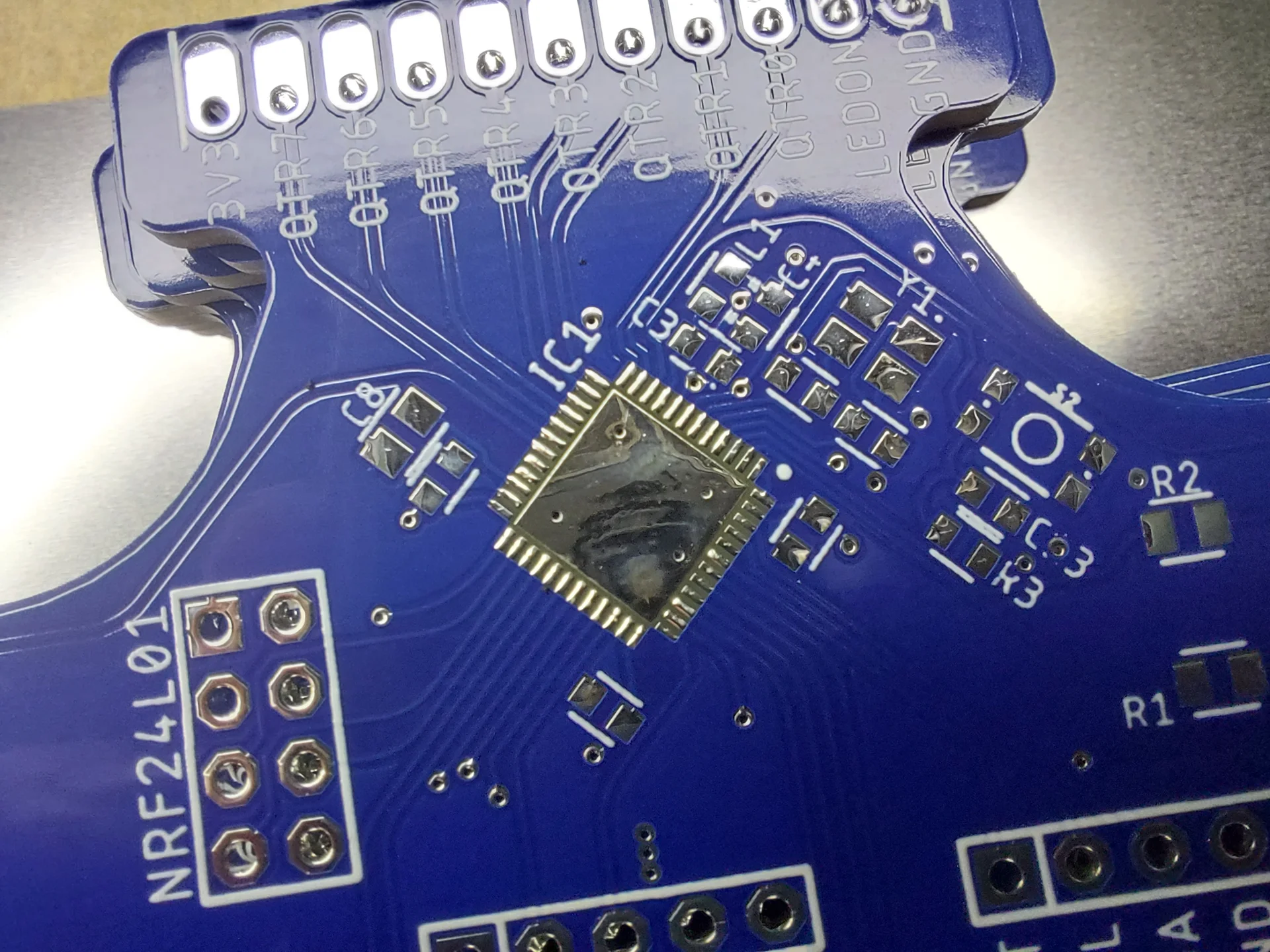
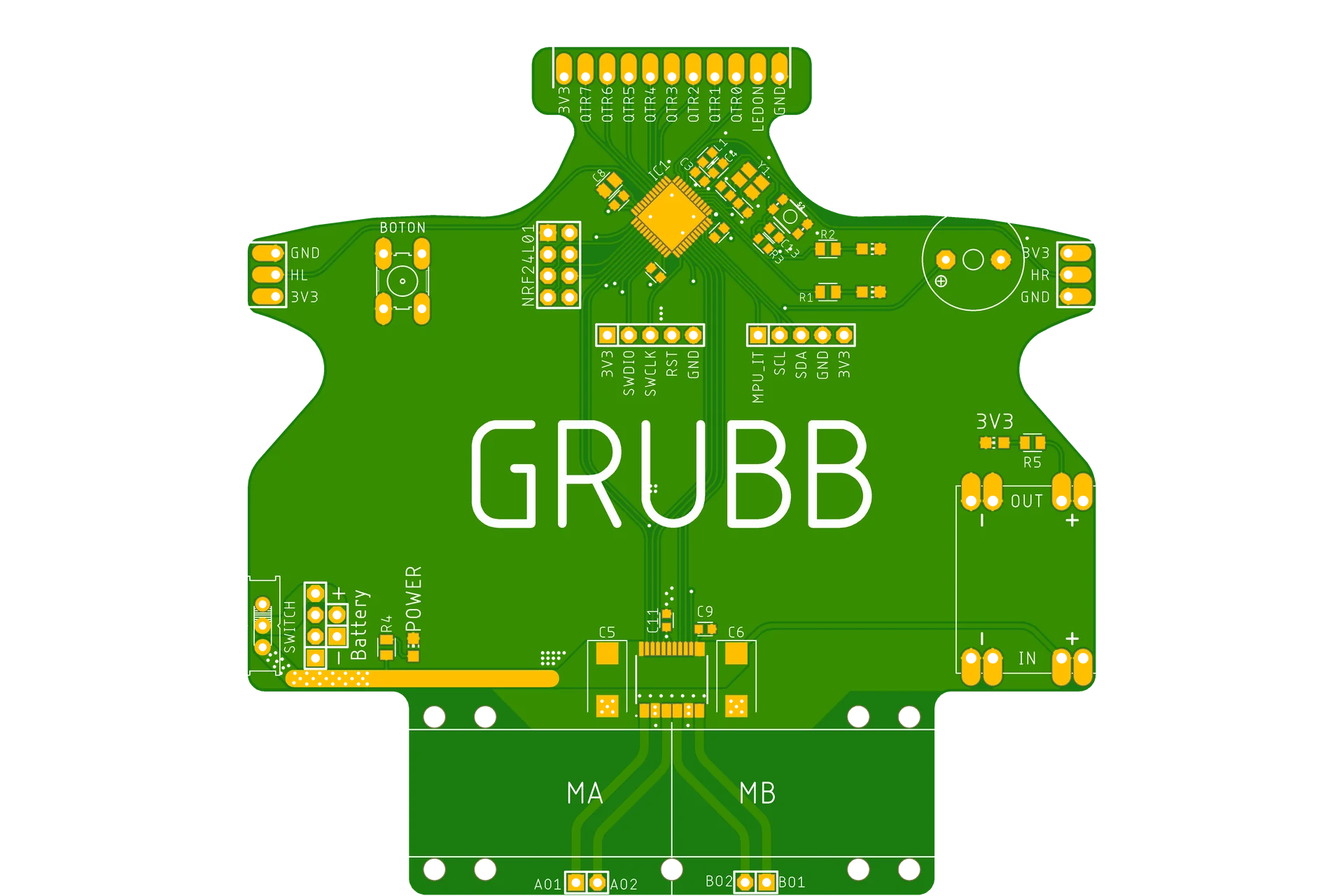
- PCB de Control con Componentes Integrados (SMD): Se diseñó la primera PCB que integró el microcontrolador y los drivers de motor como componentes SMD, abandonando los módulos para lograr un sistema más compacto, robusto y fiable.
- Migración a Arquitectura STM32: Se abandonó la plataforma Arduino para utilizar un microcontrolador STM32 (programado inicialmente con el framework de Arduino), permitiendo un procesamiento más rápido y un control más avanzado.
- Componentes de Alto Rendimiento Mecánico: La incorporación de motores JSumo y ruedas de silicona de alta adherencia proporcionó una tracción y velocidad muy superiores.

Desafíos
El principal desafío fue un fallo de hardware inducido por el entorno. La pista de la competencia, con una superficie de aluminio no reglamentaria, generaba descargas electrostáticas (ESD) que provocaron reinicios y finalmente dañaron los microcontroladores. La falta de herramientas de soldadura SMD en el evento imposibilitó la reparación en el momento.
Aprendizajes
Esta experiencia demostró de forma crítica la importancia de incluir protecciones contra ESD en el diseño de PCBs, especialmente para operar en entornos no controlados. El incidente subrayó la necesidad de estar preparado para fallos de hardware en competencia, no solo con repuestos, sino también con las herramientas adecuadas para reparaciones complejas.