PCB de Control para Joystick del Hexapod
Sobre este proyecto
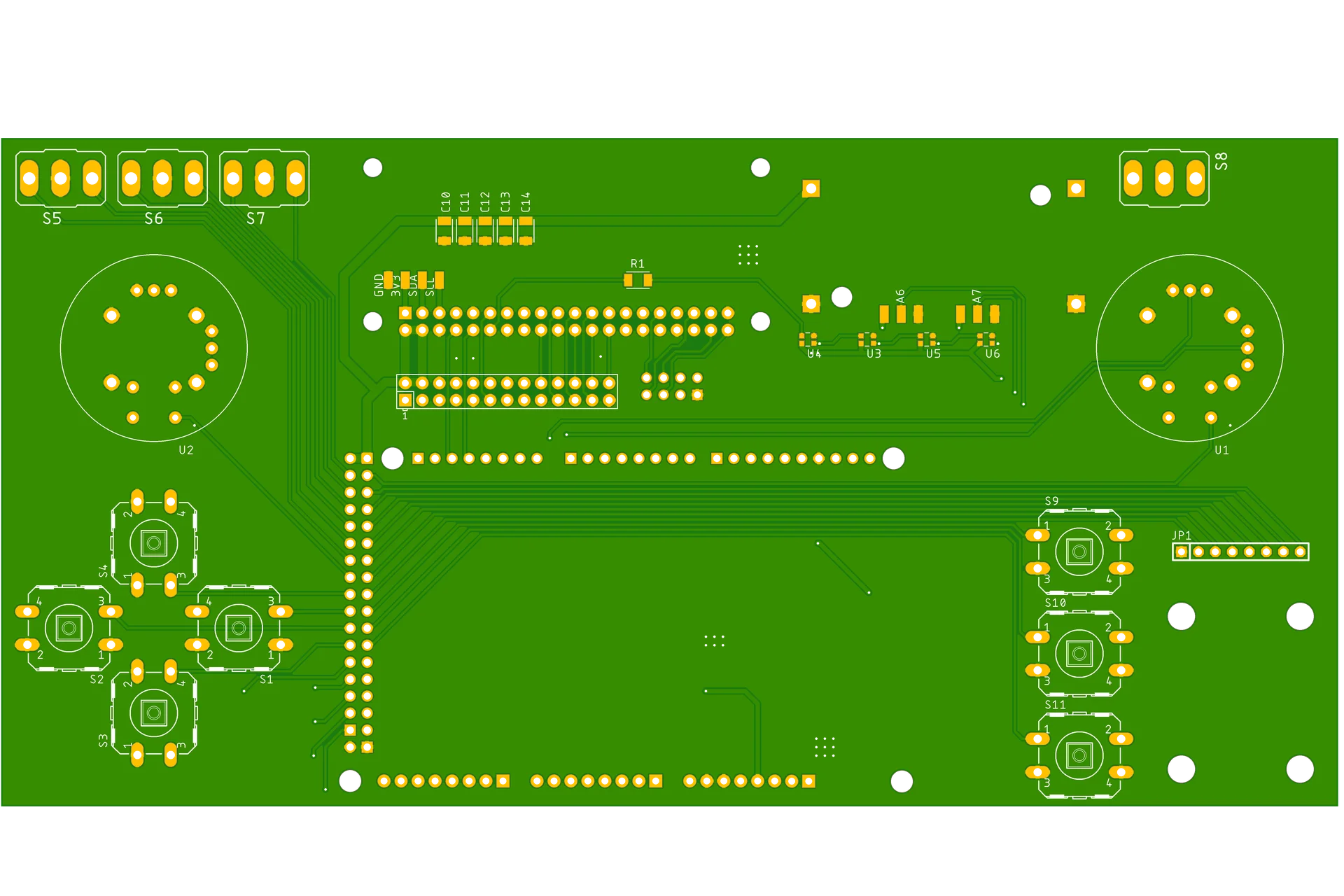
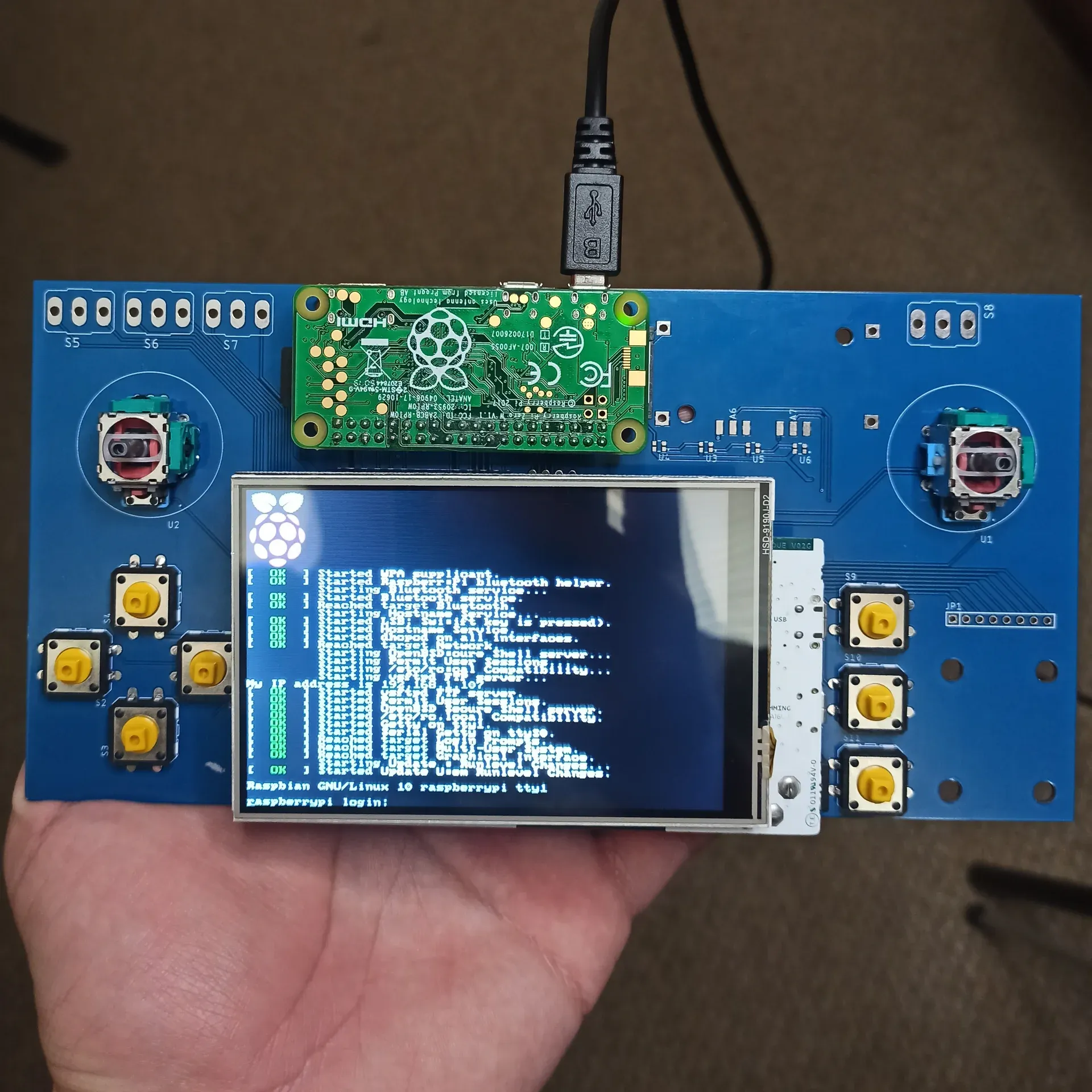
Como parte del desarrollo del Hexapod, y aprovechando el patrocinio de JLCPCB, diseñé este joystick personalizado. El objetivo era crear una solución de control 'todo en uno' que centralizara la lectura de entradas y las comunicaciones inalámbricas.
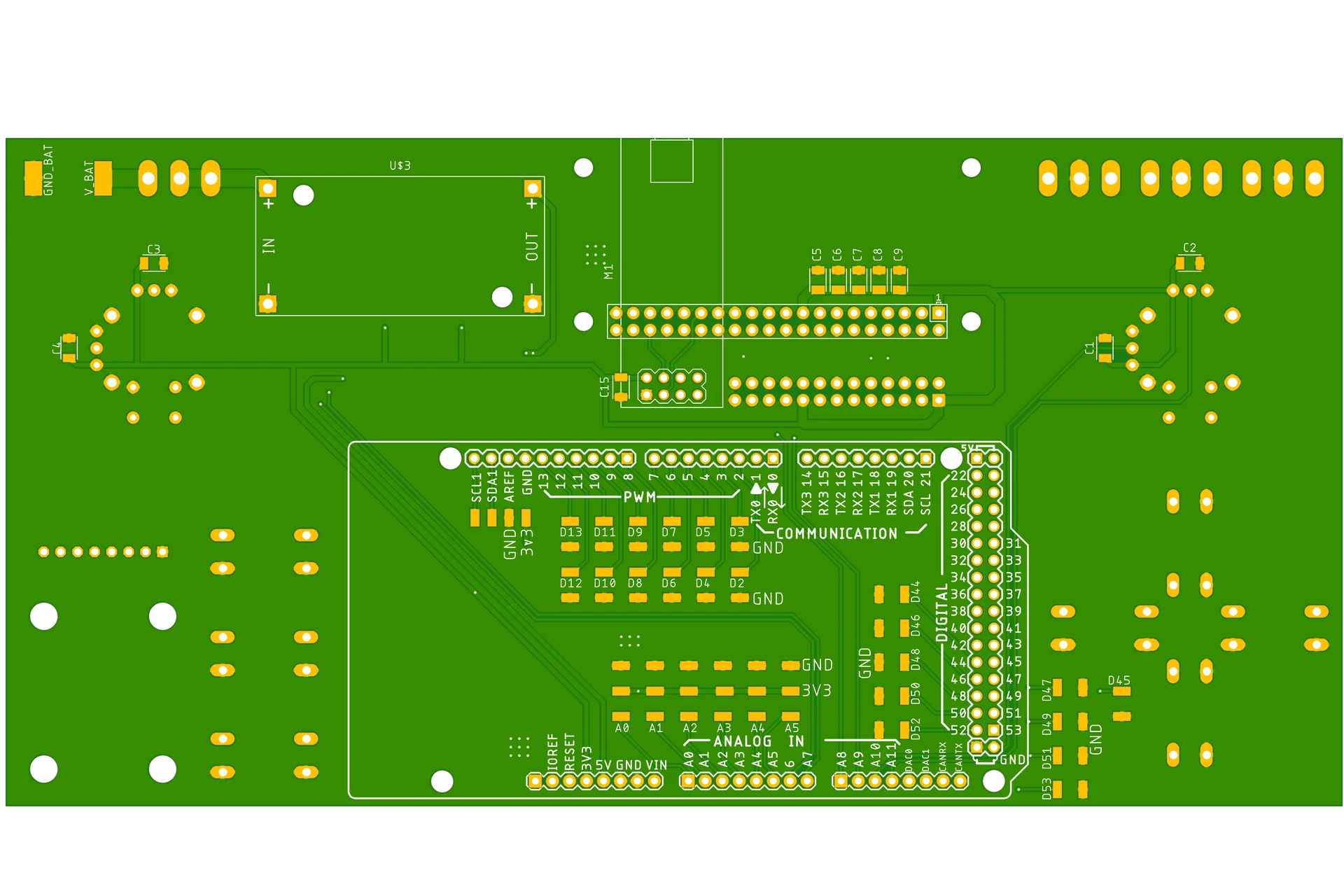
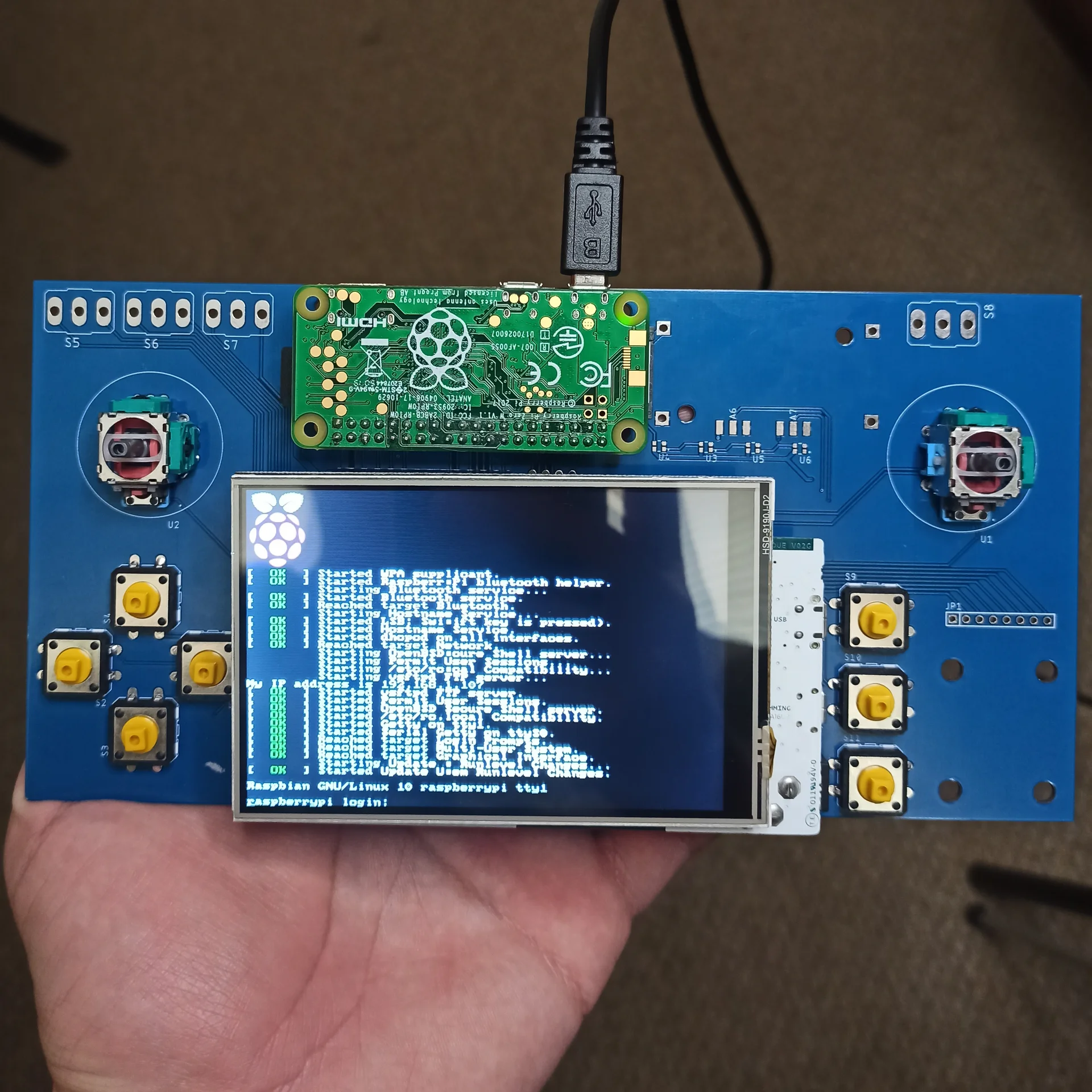
La arquitectura se basa en un sistema dual: un Arduino Due se encarga de procesar en tiempo real todos los botones y sticks analógicos, mientras que una Raspberry Pi Zero W gestiona las comunicaciones (WiFi/NRF24L01) y una pequeña pantalla LCD para depuración.
Posteriormente, la placa fue adaptada para funcionar como un periférico SPI altamente configurable, donde una Raspberry Pi externa podía modificar el comportamiento de cada entrada (modo normal, mantenido, incremental, etc.) sin necesidad de reprogramar el firmware del Arduino.
Características Clave
- Arquitectura Dual (Arduino + Raspberry Pi): Combina un Arduino Due para el procesamiento de entradas en tiempo real con una Raspberry Pi Zero W para la lógica de alto nivel, comunicaciones y visualización.
- Firmware Remotamente Configurable: Implementación de un firmware en el Arduino que permite a un maestro (vía SPI) cambiar el modo de operación de cada botón y stick, ofreciendo una gran flexibilidad y capacidad de configuración.
- Sistema de Control Integrado: Una única PCB aloja los microcontroladores, la pantalla, los conectores para módulos de comunicación y todas las entradas, creando un dispositivo de control compacto y autónomo.