Campeón Nacional de Mega Sumo 2018

Sobre este proyecto
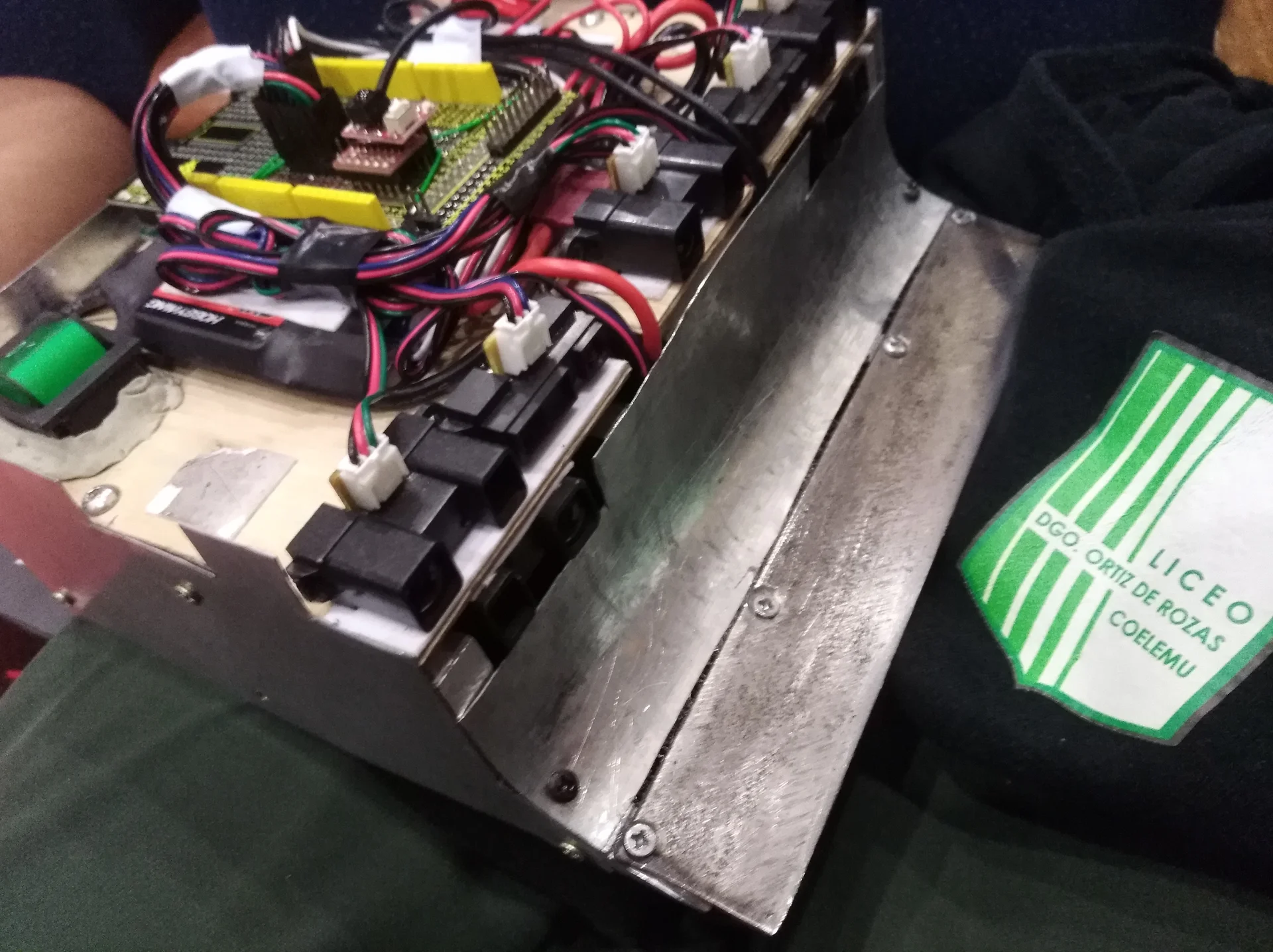
Aplicando las lecciones del año anterior, este proyecto se enfocó en la robustez y el rendimiento. Se diseñó un robot nuevo, reemplazando el chasis impreso en 3D por una estructura de aluminio mecanizado para una mayor durabilidad y rigidez.
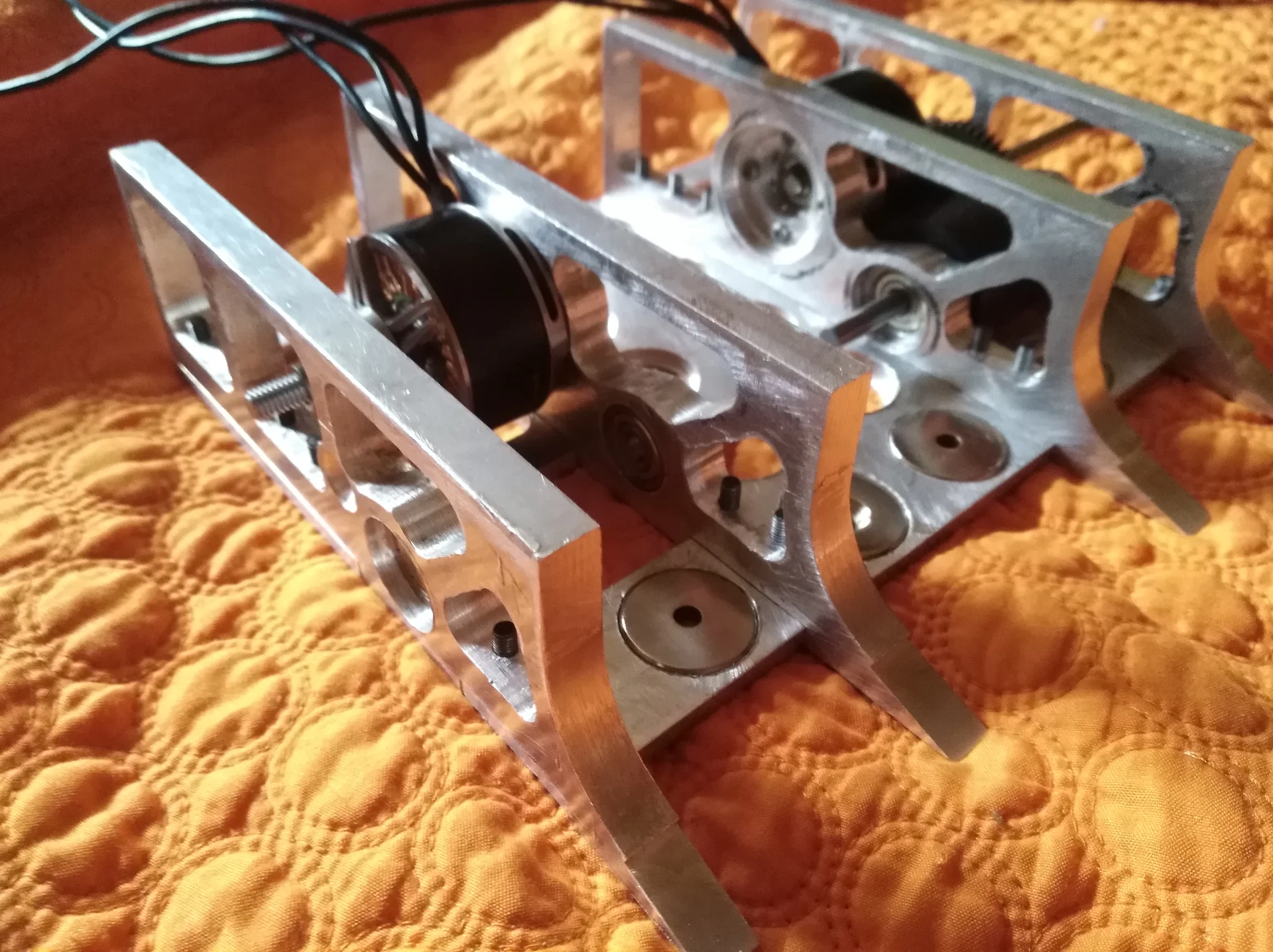
Fue mi primera implementación de motores brushless para la tracción, una decisión técnica clave para el rendimiento superior del robot. La electrónica, basada en Arduino, fue optimizada para un control más eficaz.
El rendimiento aseguró el primer lugar en la competencia nacional, otorgándonos la acreditación para representar a Chile en la All Japan Robot-Sumo Tournament.
Características Clave
- Chasis de Aluminio Mecanizado: Se migró a un chasis metálico que proporcionó una rigidez y resistencia a impactos muy superior, logrando una ventaja competitiva decisiva.
- Implementación de Motores Brushless: Primera aplicación de motores brushless para la tracción, lo que resultó en un aumento significativo de potencia y velocidad.
- Campeonato Nacional y Clasificación Mundial: La victoria validó el nuevo enfoque de diseño y aseguró un cupo para la All Japan Robot-Sumo Tournament en Tokio.




Desafíos
El principal desafío técnico fue la gestión de los motores brushless con ESCs comerciales. Estos controladores mostraron serias limitaciones en torque de arranque y tiempo de respuesta, lo que requirió una calibración y programación cuidadosa.
Aprendizajes
Este proyecto consolidó la importancia del diseño mecánico de alta calidad. Sin embargo, el aprendizaje más significativo fue identificar las limitaciones de los ESCs comerciales, demostrando que para explotar su potencial era necesario un controlador superior. Esta conclusión fue determinante y sentó las bases para mi futuro proyecto de título, motivando mi investigación y desarrollo de un controlador de motores personalizado de tipo FOC.