Robotracer V4 - Rediseño Total
Sobre este proyecto
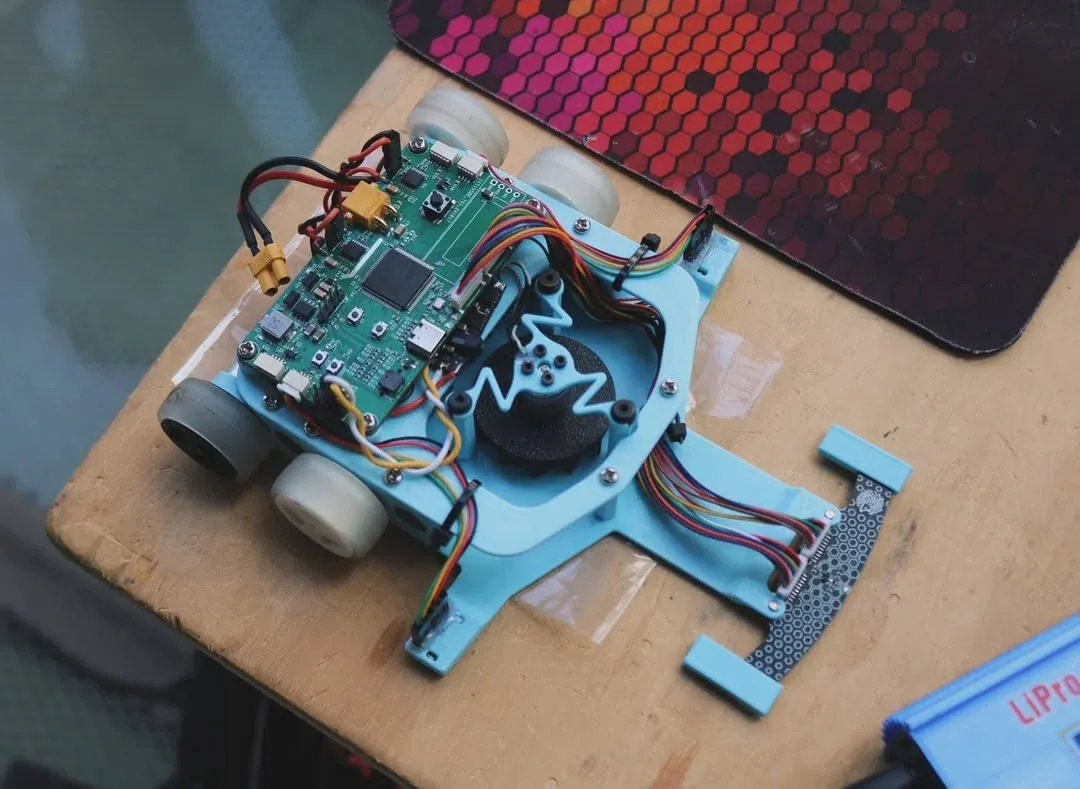
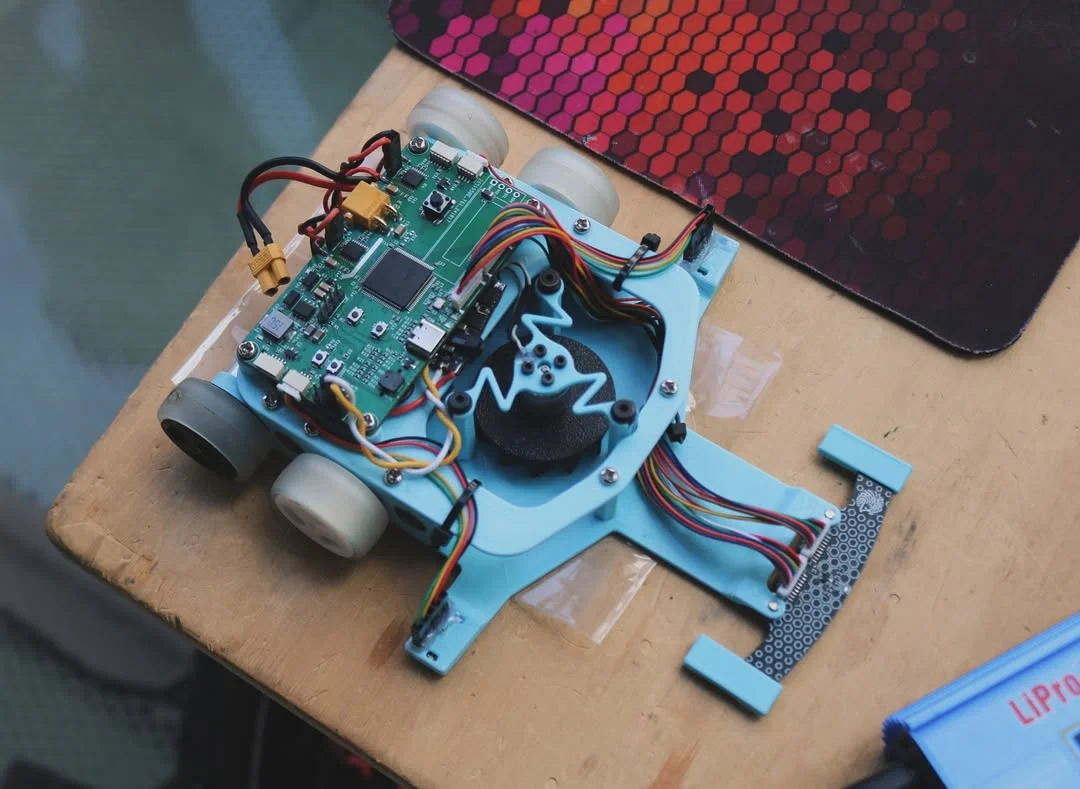
Con la experiencia ganada y el apoyo de un equipo español, realizamos un rediseño completo del robot para maximizar la eficiencia. La nueva arquitectura separó el chasis de la electrónica, creando una PCB de control mucho más compacta y potente.
El salto tecnológico fue inmenso: migramos a un microcontrolador STM32H7 de alto rendimiento y diseñamos nuestro propio sensor infrarrojo de 12 canales. Además, en un esfuerzo intensivo, migré todo el firmware a las librerías HAL de STM32 en solo tres días antes del evento.
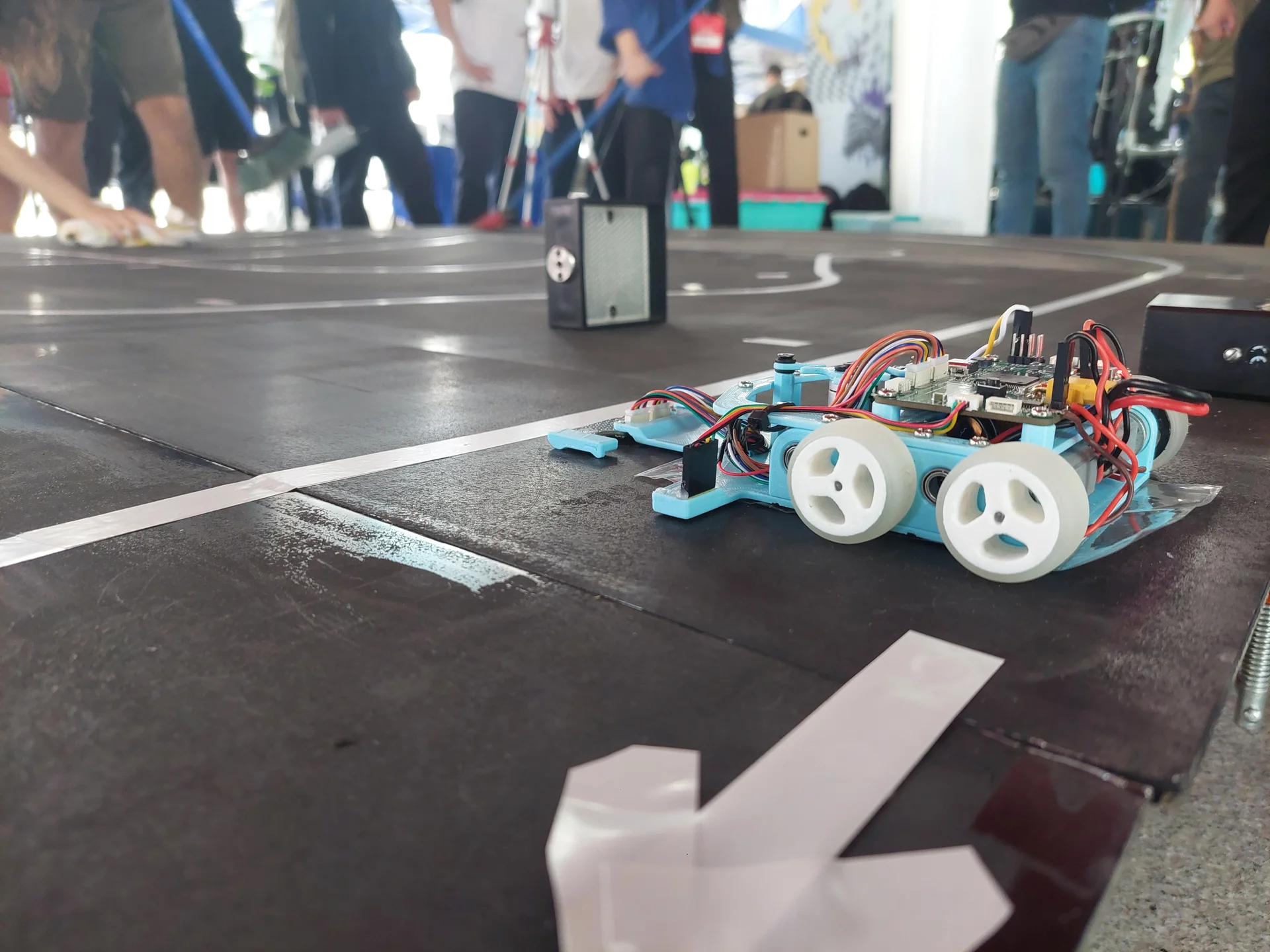
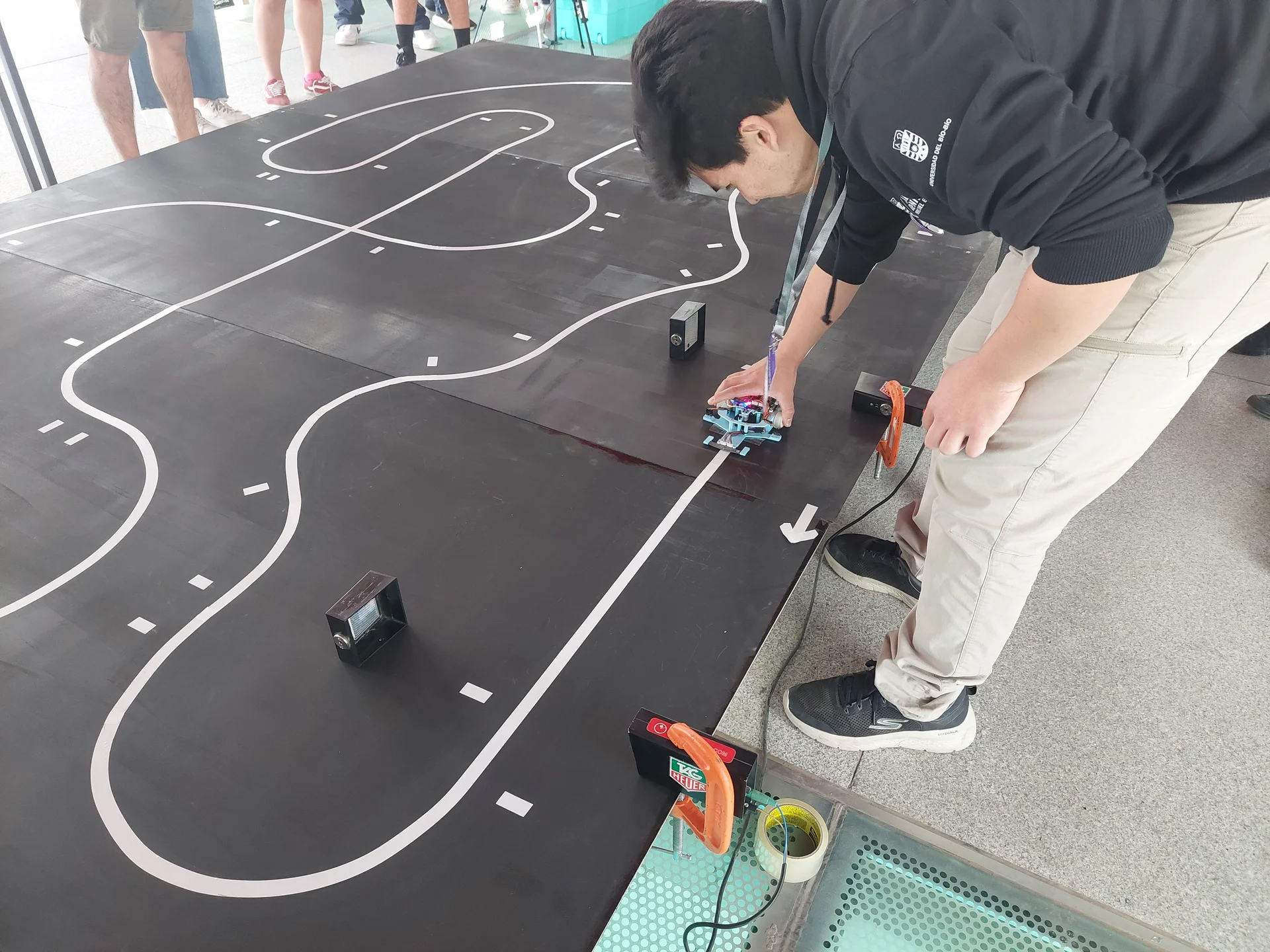
El rediseño se tradujo directamente en los resultados, logrando un triple podio para el equipo y obteniendo el primer lugar en las dos categorías principales.
Características Clave
- PCB de Control con STM32H7: Se diseñó una nueva PCB de 4 capas con un potente microcontrolador STM32H7, permitiendo un procesamiento de datos mucho más rápido y un control más sofisticado.
- Sensor Infrarrojo Personalizado de 12 Canales: Diseñamos y ensamblamos nuestro propio sensor, proporcionando una detección de la línea con mayor resolución que los sensores comerciales.
- Migración a Firmware HAL: Se reescribió el código para utilizar las librerías HAL de STM32, dándonos un control de bajo nivel sobre el hardware y optimizando la eficiencia.

Desafíos
El desafío más grande fue migrar y depurar todo el firmware a STM32 HAL en un plazo extremadamente ajustado de 3 días. Esto requirió un conocimiento profundo de la arquitectura del microcontrolador y una depuración intensiva para garantizar la estabilidad.
Aprendizajes
Esta experiencia demostró el enorme salto de rendimiento que se obtiene al pasar a un entorno de programación de bajo nivel (HAL vs. Arduino). Consolidó mis habilidades en diseño de PCBs complejas y en el desarrollo de firmware de alto rendimiento bajo presión.