Prototipo Experimental con Control FOC
Sobre este proyecto
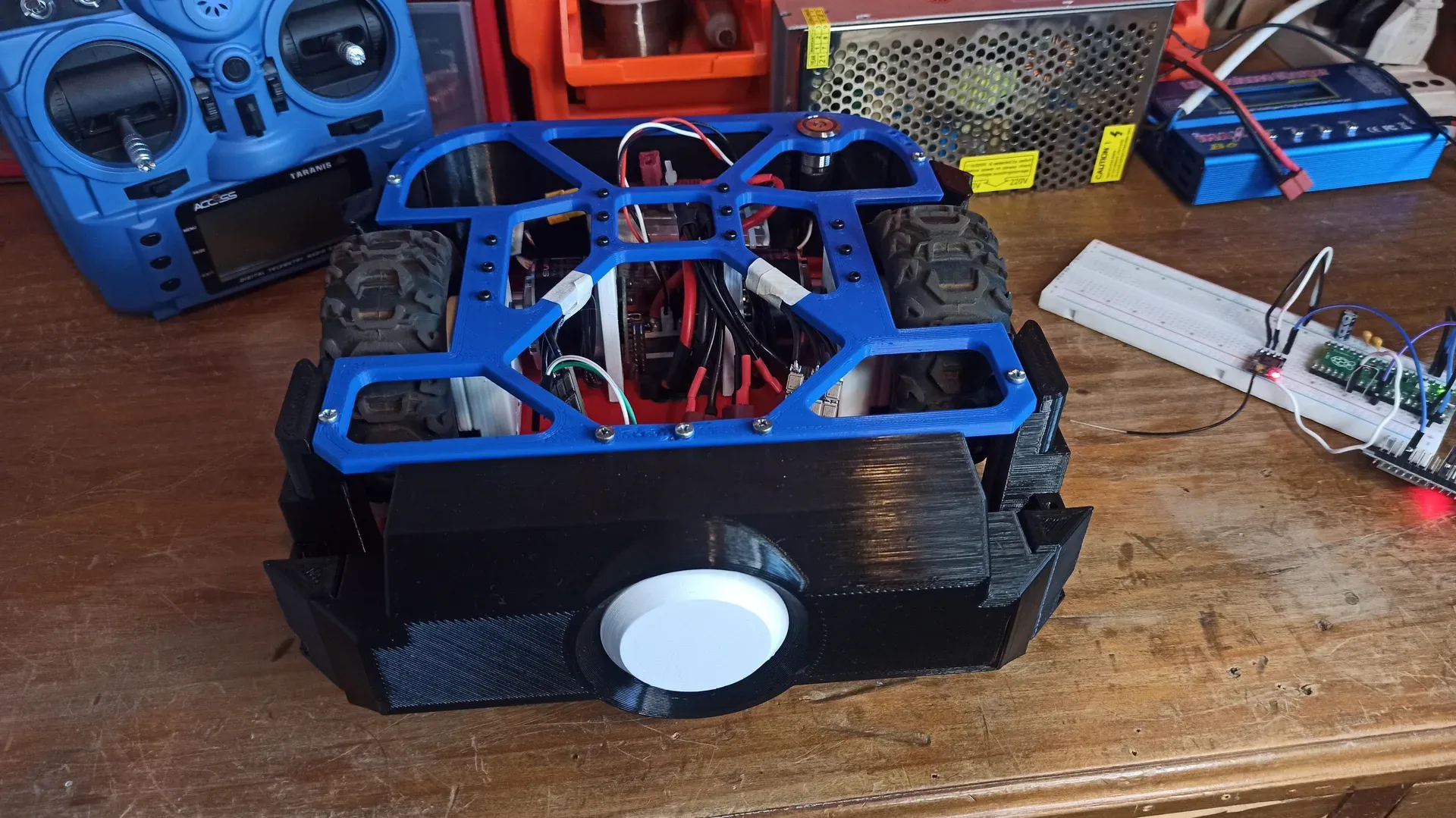
Este robot fue concebido como un proyecto puramente experimental para participar en una actividad recreativa. Su principal objetivo era servir como plataforma de aprendizaje para la tecnología de control FOC (Field-Oriented Control), que hasta entonces solo conocía en teoría.
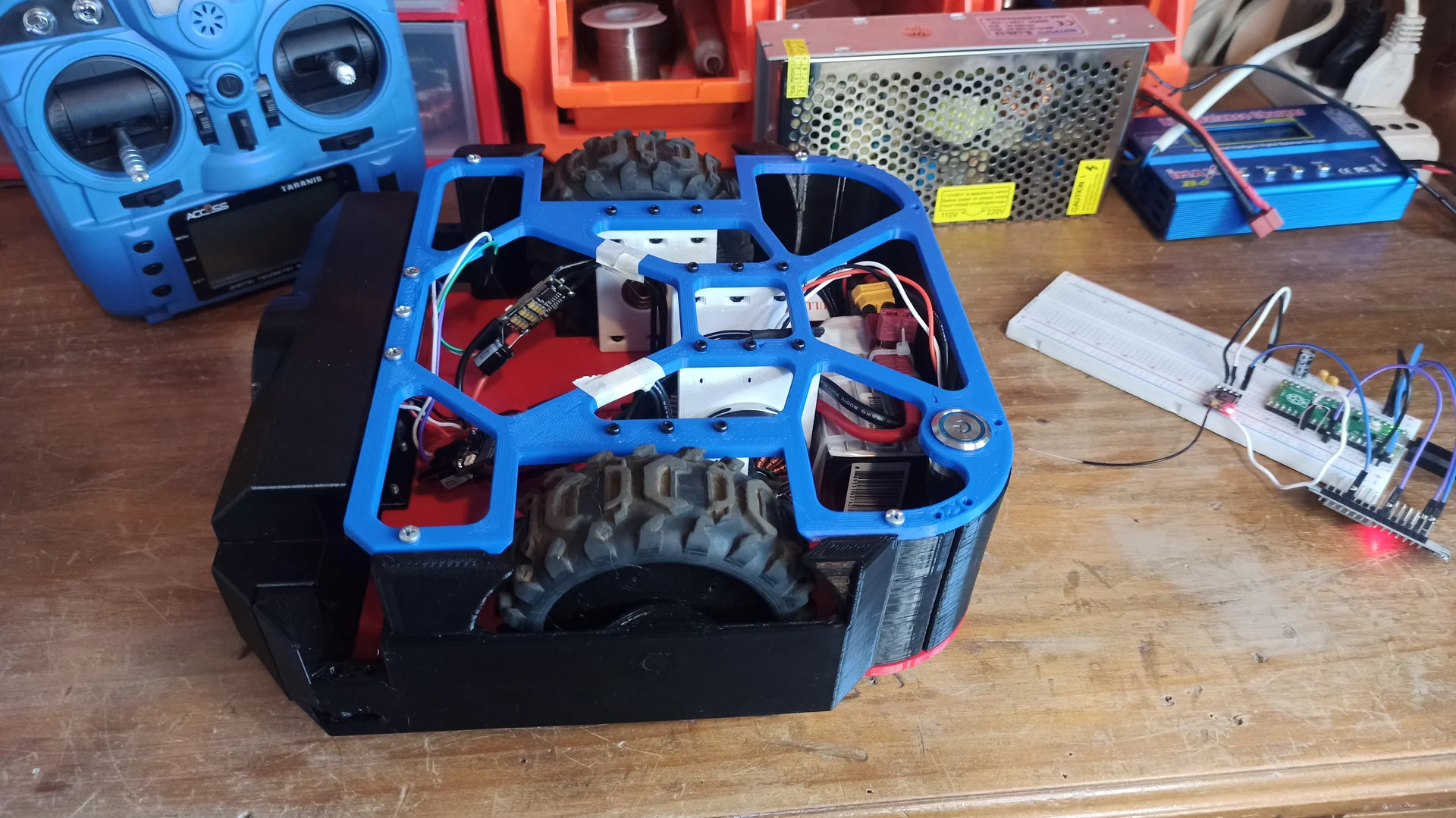
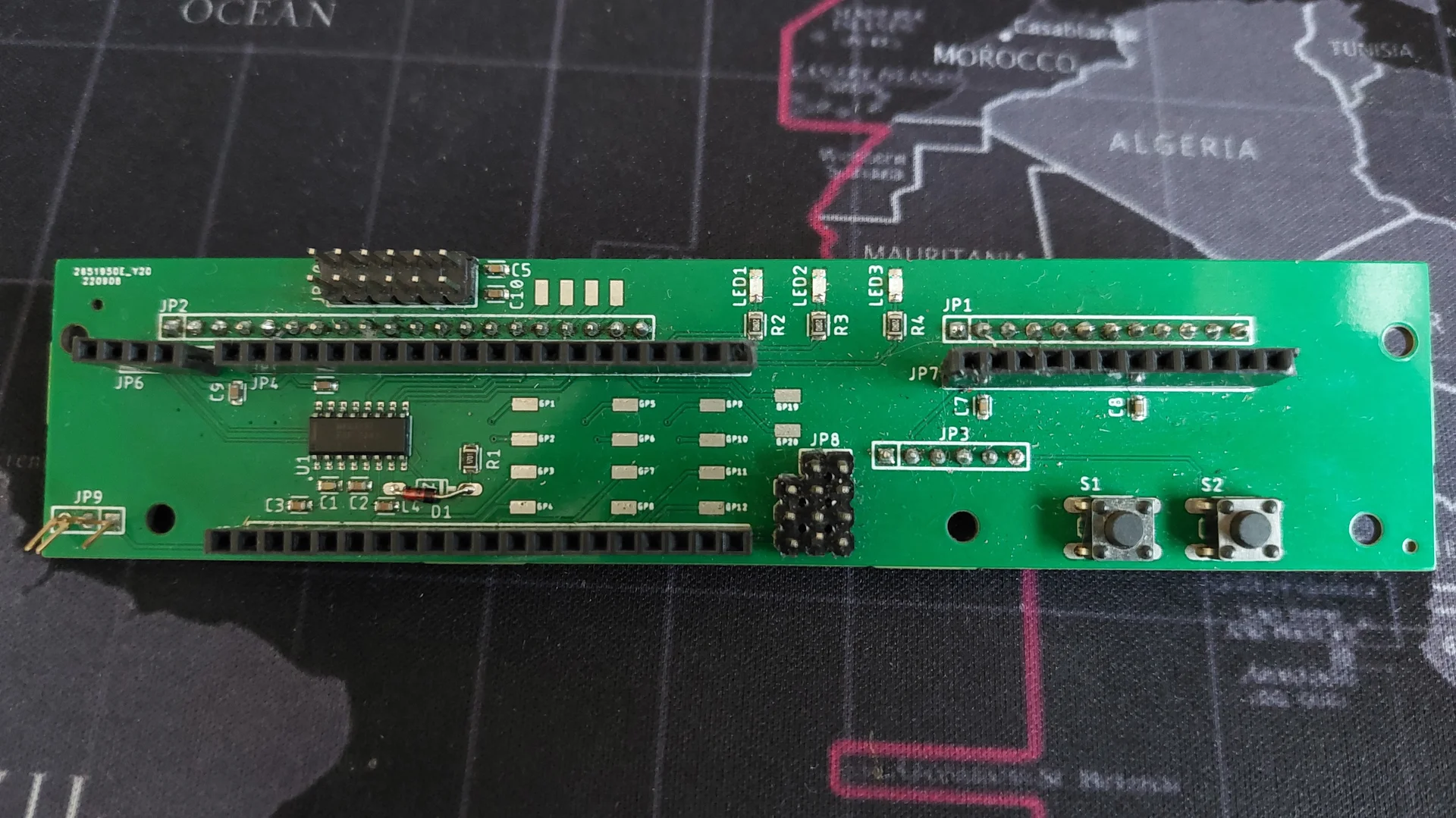
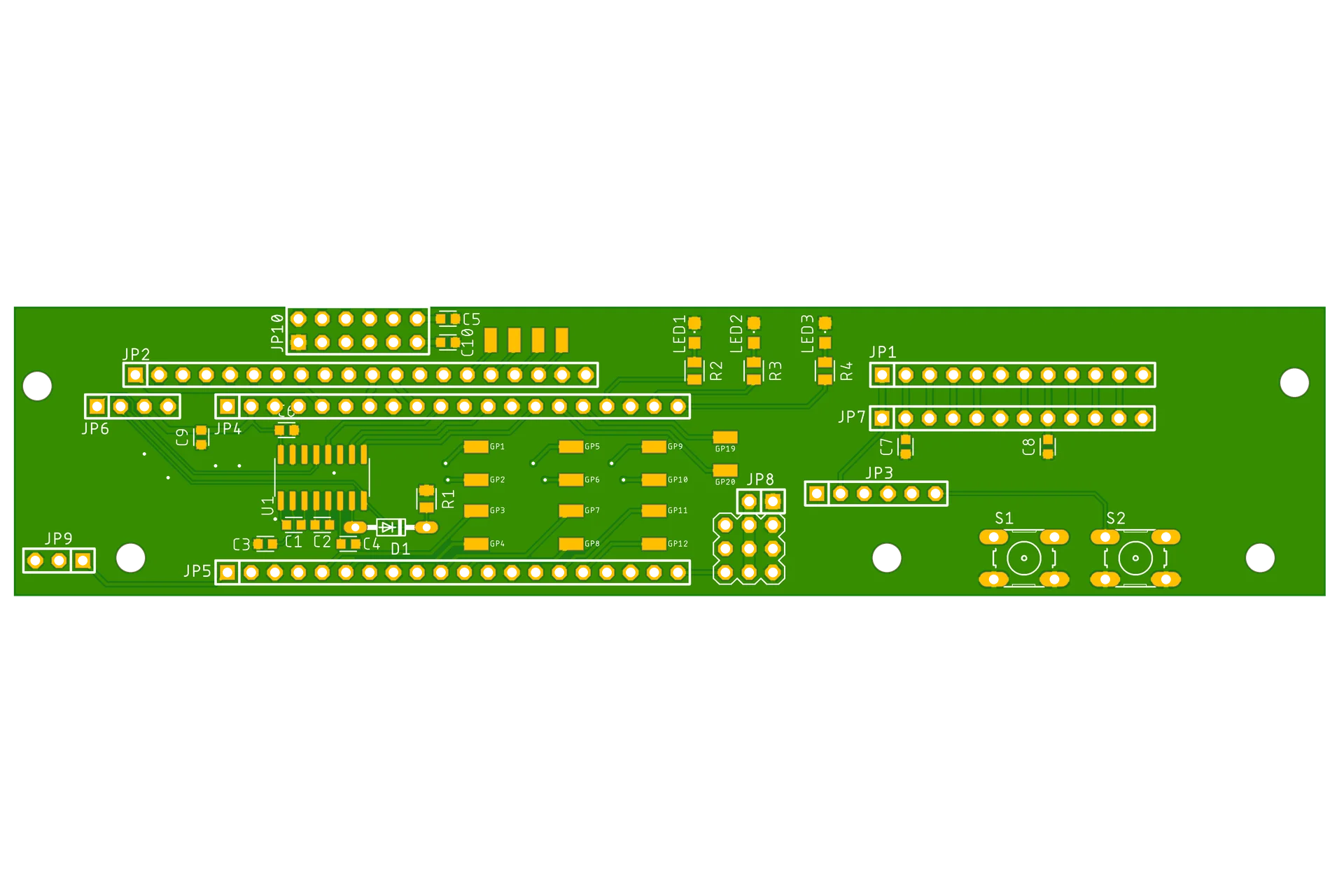
Utilizando el patrocinio de JLCPCB, diseñé una PCB a medida que permitía integrar de forma limpia un microcontrolador con la Odrive 3.6. Toda la estructura del robot se fabricó mediante impresión 3D, lo que facilitó la iteración rápida del diseño.
La participación en el "Rodeo de Robótica" proporcionó un entorno de baja presión ideal para realizar las primeras pruebas, entender el proceso de configuración de la Odrive y observar el comportamiento de los motores brushless bajo este tipo de control avanzado.
Características Clave
- Plataforma de Aprendizaje FOC: Primer robot funcional en el que implementé y configuré una Odrive 3.6, sentando las bases para todos mis proyectos futuros con control de motores brushless.
- PCB de Integración Personalizada: Diseño de una placa de circuito impreso para conectar directamente el microcontrolador de control principal con la placa Odrive, simplificando el cableado y mejorando la fiabilidad.
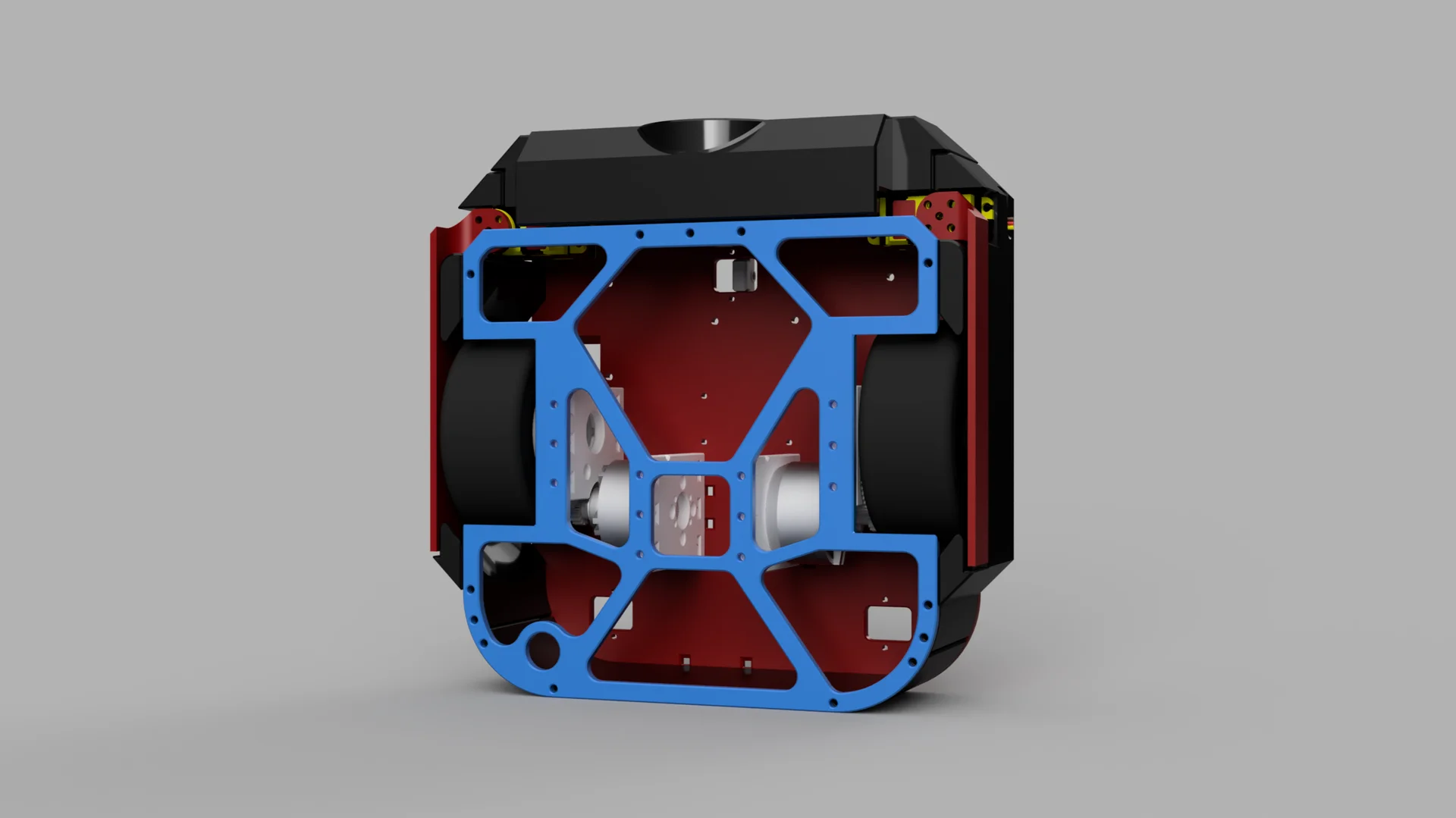
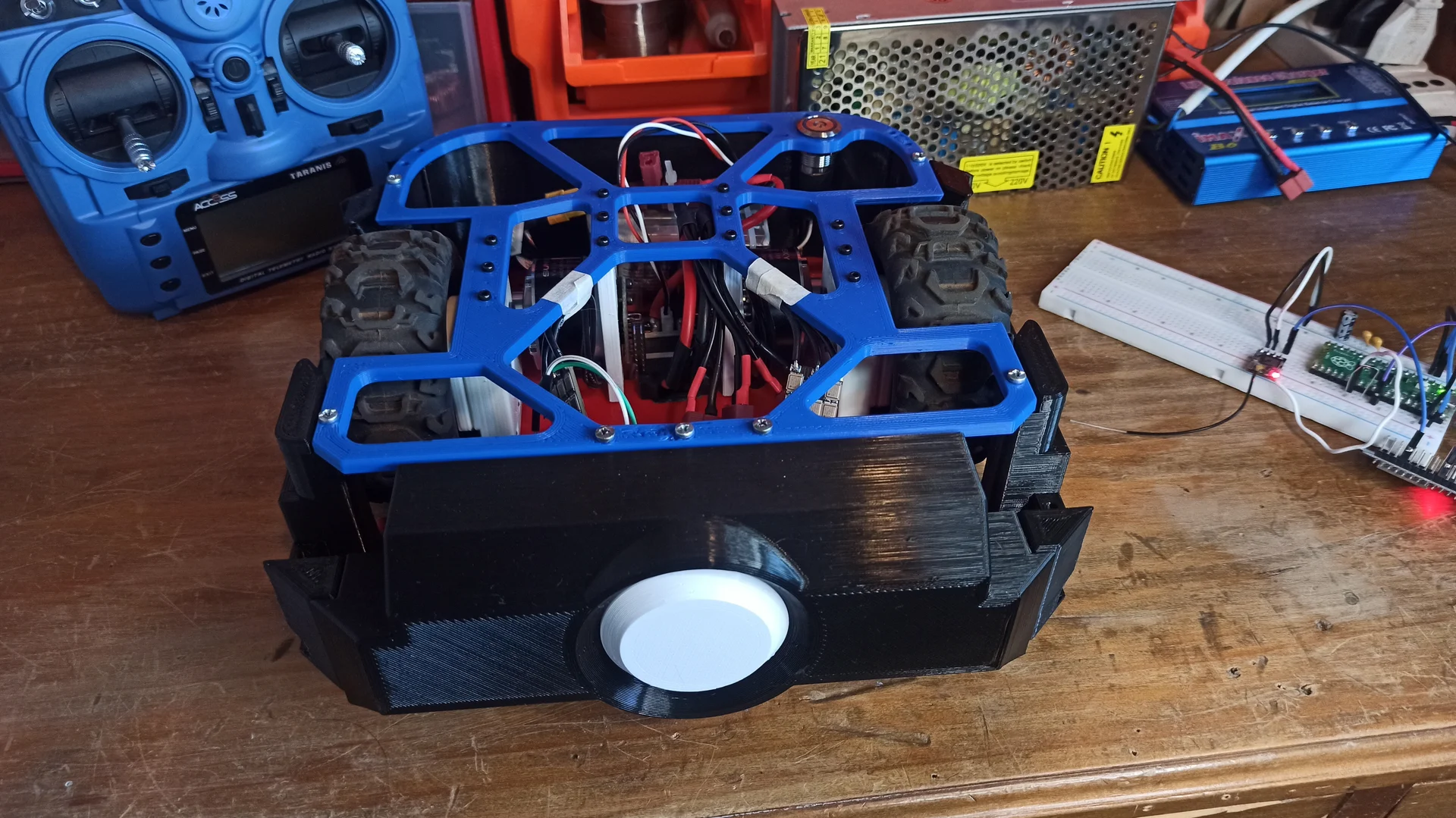
- Prototipado Rápido con Impresión 3D: Uso intensivo de la impresión 3D para fabricar todo el chasis y los soportes, permitiendo un desarrollo ágil y a bajo costo.
Desafíos
El principal desafío fue la pronunciada curva de aprendizaje del ecosistema Odrive, incluyendo su configuración, calibración y la programación de la comunicación con el microcontrolador principal. Fue un proceso de mucha prueba y error.
Aprendizajes
Este proyecto fue fundamental. Me permitió comprender en la práctica los beneficios del control FOC, como el alto torque a cero RPM y la respuesta instantánea. La experiencia adquirida aquí fue la base sobre la que se construyeron robots de competencia mucho más complejos, como el BattleBot y "Asura Kabuto".