Robotracer V6 en Japón

Sobre este proyecto
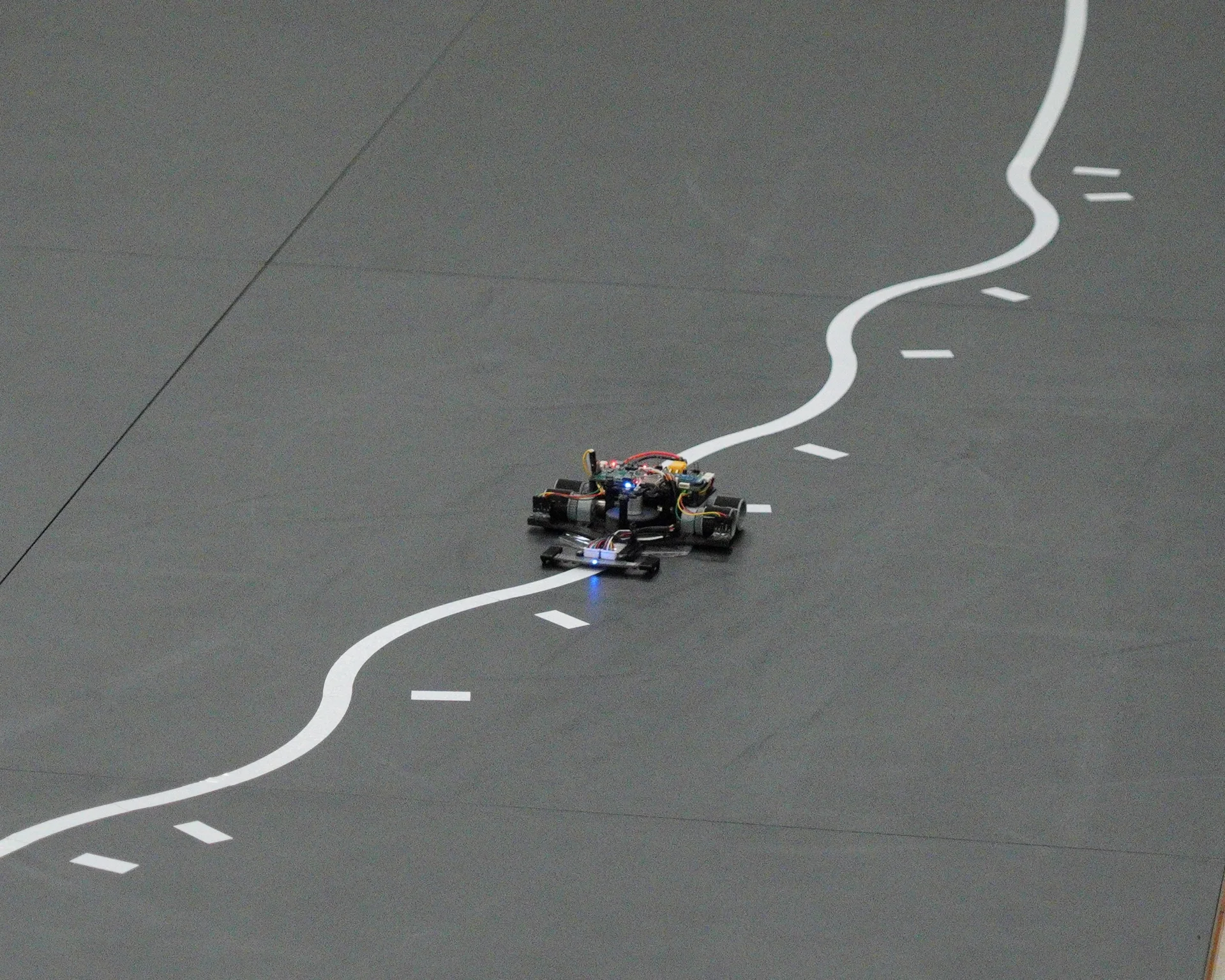
Participamos en la prestigiosa "All Japan Micromouse Contest". Este evento representó la prueba definitiva para nuestro diseño, enfrentándonos a los mejores equipos del mundo.
Las mejoras finales se centraron en la precisión y la fiabilidad. Se integraron encoders magnéticos para implementar un control de velocidad de lazo cerrado, permitiendo fijar velocidades constantes en m/s. Además, se fabricaron nuevas hélices de alta resistencia para la turbina para maximizar el efecto suelo de forma segura.
Características Clave
- Control de Velocidad con Encoders: Se implementó un control de velocidad en bucle cerrado utilizando encoders magnéticos, lo que permitió al robot mantener una velocidad constante y precisa, independientemente de la carga o el nivel de la batería.
- Optimización de Turbina para Alto Rendimiento: Las hélices de la turbina se fabricaron en resina de alta tenacidad, permitiendo que operara a mayores RPM de forma segura para generar una fuerza descendente superior.
- Puesta a Punto para Pista Internacional: Se realizaron calibraciones finas de los sensores y ajustes en los algoritmos para adaptar el robot a las condiciones específicas de la pista oficial en Japón.



Desafíos
El mayor contratiempo fue la rotura de la turbina durante las pruebas, lo que exigió una reparación de emergencia con piezas de un dron adquirido en Akihabara. Posteriormente, el uso de un nuevo material de alta adherencia en las ruedas expuso una desalineación mínima en los ejes (producto del desgaste), provocando que el exceso de agarre frenara al robot en las curvas de la pista oficial.
Aprendizajes
La lección fundamental fue sobre la interdependencia de los sistemas: la optimización de un componente (la adherencia de las ruedas) expuso una debilidad latente en otro (la desalineación por desgaste mecánico). Esto demostró la importancia crítica de realizar pruebas de validación integrales en condiciones idénticas a las de la competencia.