Robot Hexapod

Sobre este proyecto
Concebido desde cero durante la pandemia, este robot Hexapod representa uno de mis proyectos más integrales. A lo largo de 8 meses, diseñé y fabriqué toda su estructura mediante impresión 3D, creando las complejas piezas mecánicas que dan vida a sus 6 patas, cada una con 3 grados de libertad.
Su arquitectura electrónica es un sistema de control distribuido: una Raspberry Pi 4 ejecuta los cálculos de cinemática inversa en Python, mientras que una Raspberry Pi Pico se dedica a la gestión en tiempo real de las señales PWM para los 18 servomotores. Este proyecto fue mi puerta de entrada al diseño de PCBs, impulsado por un patrocinio de JLCPCB que obtuve gracias a la visibilidad del proyecto.
El control del robot es flexible, soportando operación remota vía terminal SSH o de forma inalámbrica con un joystick. El software fue diseñado con un enfoque multiproceso, utilizando sockets para desacoplar la lógica de control del motor de cinemática, garantizando un rendimiento fluido y una arquitectura modular.
Características Clave
- Diseño Evolutivo en 3D: El robot evolucionó a través de 3 versiones principales, mejorando la robustez estructural, optimizando el ruteo de cables y adaptando el chasis para servomotores progresivamente más potentes (desde 8 kg·cm hasta 60 kg·cm).
- Sistema de Control Dual (Pi 4 + Pico): Una arquitectura de control distribuida: una Raspberry Pi 4 ejecuta los cálculos de cinemática inversa en Python, mientras que una Raspberry Pi Pico actúa como co-procesador en tiempo real, dedicado exclusivamente a la generación de señales PWM para los 18 servos.
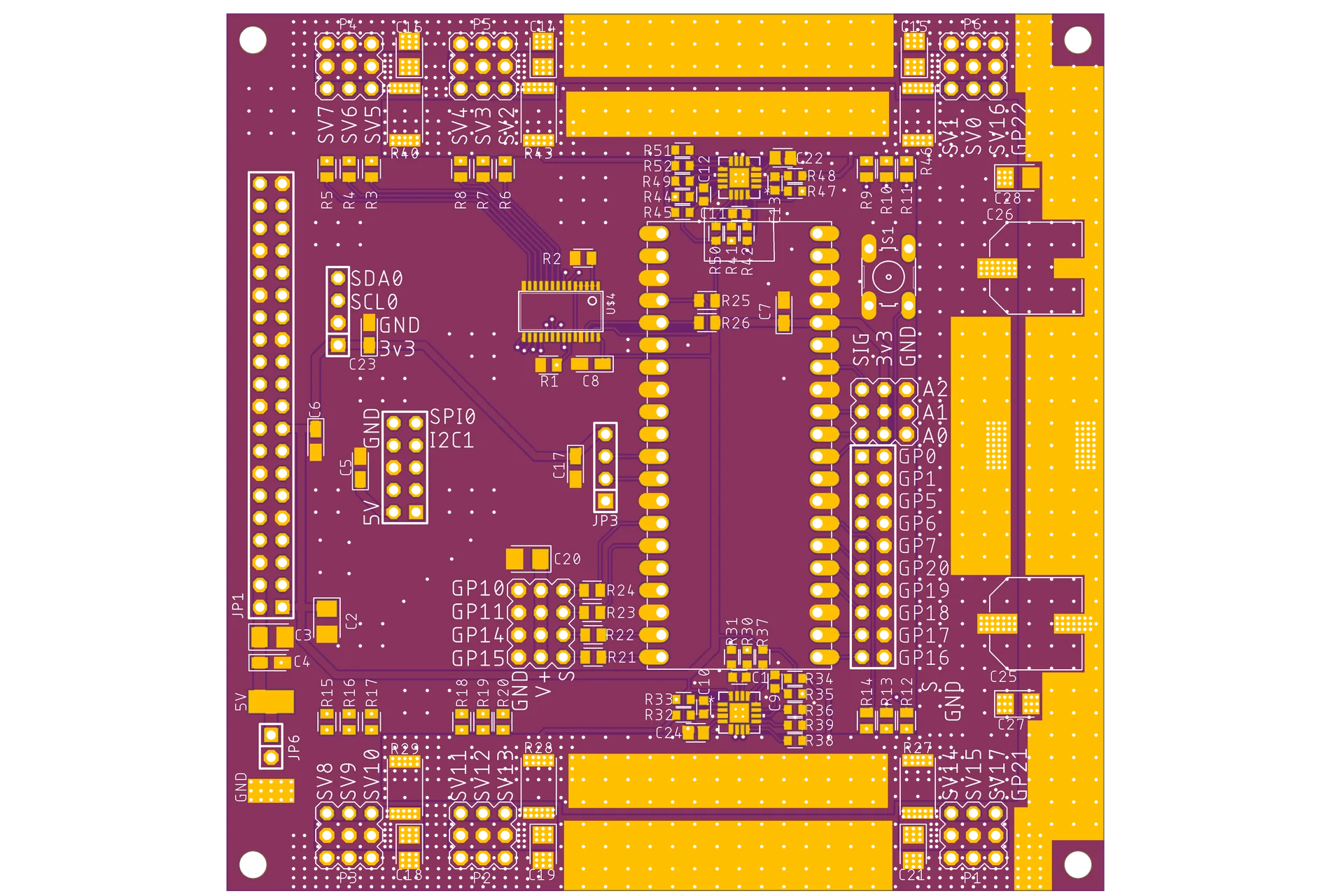
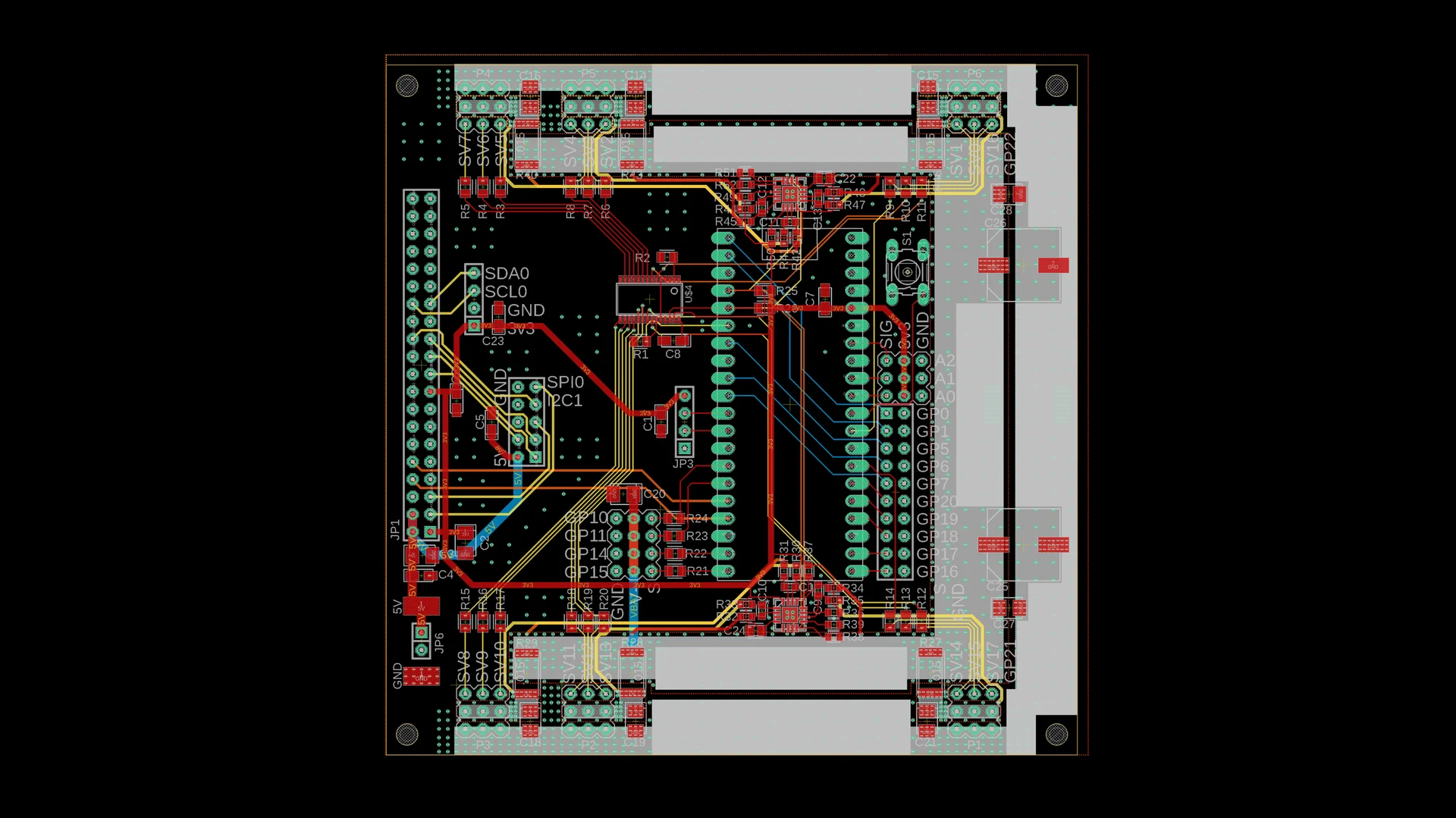
- PCB de Control Personalizada: Se diseñó y fabricó una PCB a medida que integra la RPi Pico, el controlador de servos PCA9685, y sistemas de medición de corriente por pata, centralizando toda la electrónica de control.
- Librería de Cinemática Inversa: Desarrollo de una librería de software en Python que traduce comandos de movimiento de alto nivel (ej. "avanzar", "rotar") en los ángulos precisos para cada uno de los 18 ejes del robot.





Desafíos
El principal desafío fue la gestión de la carga mecánica. La primera iteración sufría de oscilaciones por falta de torque, mientras que la segunda quemaba los servos de mayor esfuerzo. Esto exigió un rediseño completo de la estructura para integrar servomotores de alto rendimiento, validando la importancia del diseño iterativo.
Aprendizajes
Este proyecto consolidó mis habilidades en diseño mecánico para fabricación aditiva, diseño de PCBs y la implementación práctica de algoritmos complejos. La lección fundamental fue la importancia de la iteración para resolver problemas imprevistos y la necesidad de sobredimensionar componentes críticos para garantizar la fiabilidad del sistema.