Mega Sumo "Asura Kabuto"
Sobre este proyecto
"Asura Kabuto" representa la culminación de años de desarrollo en robótica de sumo. Fue concebido como mi diseño más avanzado, aplicando el conocimiento adquirido sobre control FOC y diseño mecánico.
El proyecto dio un salto cualitativo gracias al patrocinio de PCBWAY, que permitió fabricar el chasis final en aluminio 7075 mediante CNC. El tren de potencia se basa en dos motores brushless Sunnysky X3120 de 1600W.
En combate, el robot demostró una fuerza de empuje frontal excepcional. Sin embargo, su velocidad punta, inferior a la de los competidores de élite, se convirtió en una desventaja táctica crucial que resultó en una derrota por flanqueo en la primera ronda.
Características Clave
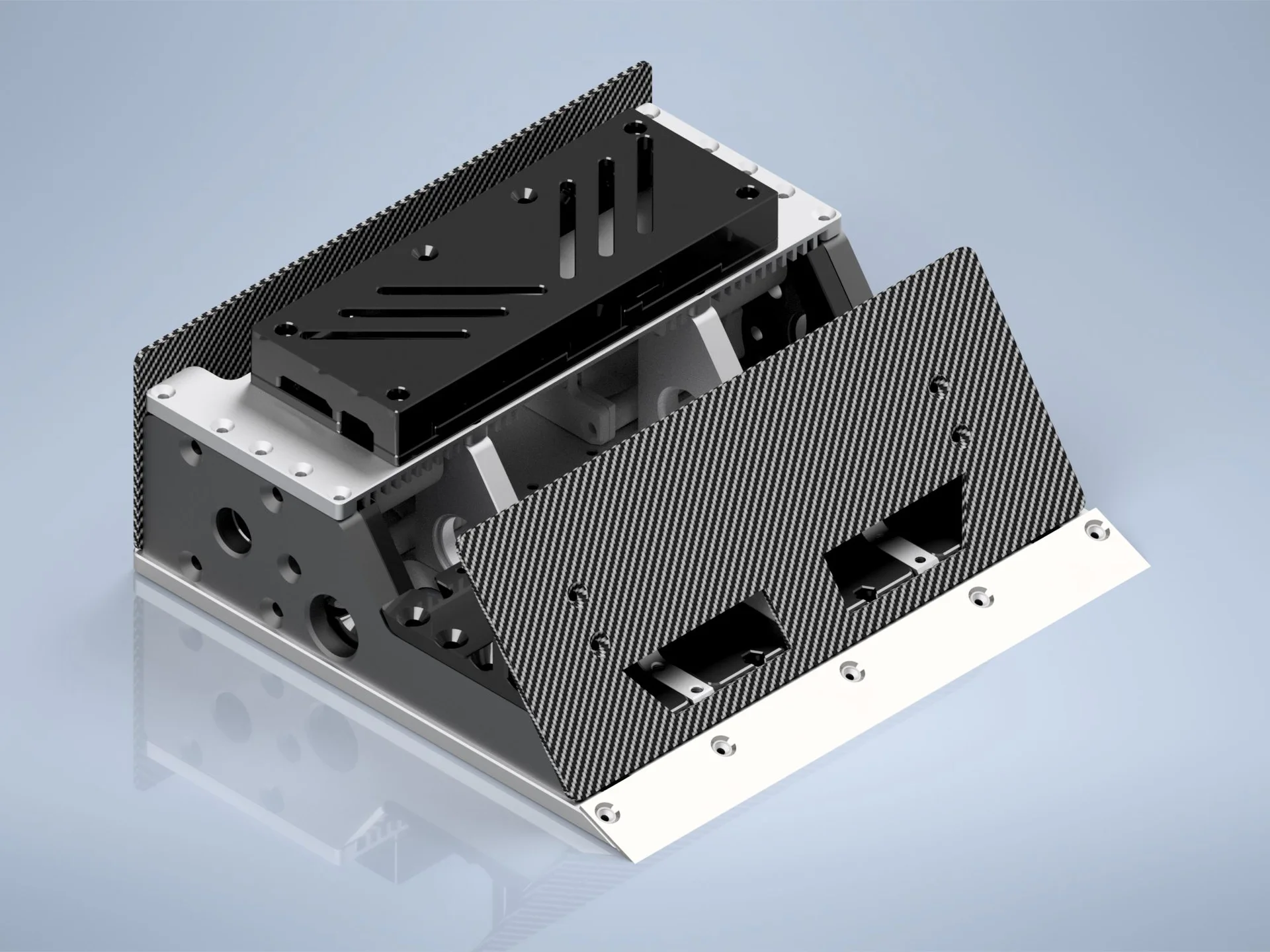
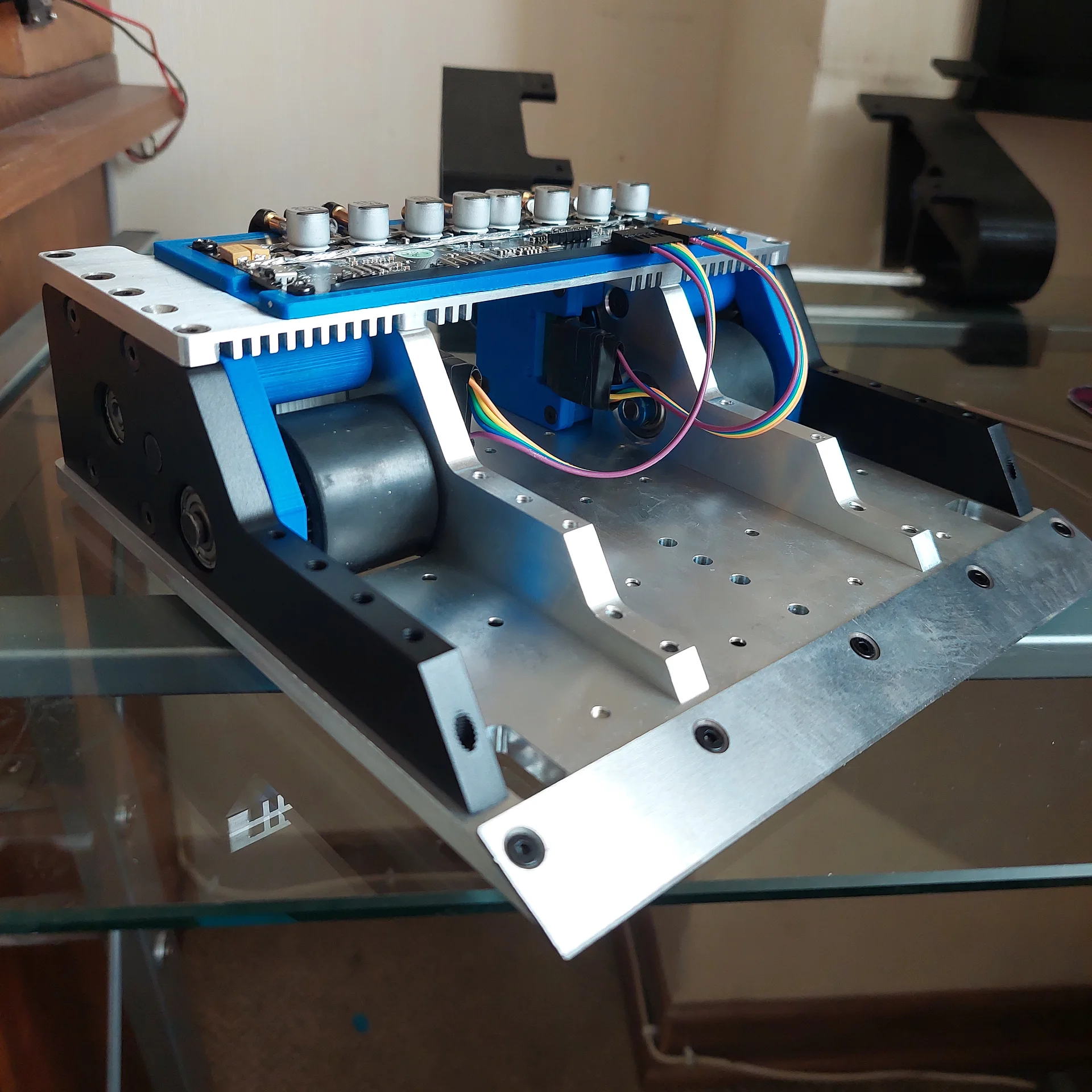
- Chasis de Aluminio 7075 CNC: Estructura principal fabricada en aluminio de grado aeroespacial para maximizar la rigidez y durabilidad, soportando los violentos impactos del sumo de alto nivel.
- Control FOC de Alta Potencia: Uso de dos motores brushless de 1600W (Sunnysky X3120) controlados por una ODrive 3.6, para entregar un torque masivo e instantáneo.
- Estrategia de "Tanque": Diseño enfocado en la fuerza bruta y la resistencia, utilizando una matriz de imanes de neodimio para maximizar la adherencia y anular el empuje rival.




Desafíos
El principal desafío técnico fue adaptar la Odrive 3.6 para soportar los picos de corriente de los motores sin sobrecalentarse. En competencia, el reto fue táctico: la baja velocidad punta (aprox. 3 m/s vs 6-8 m/s de la élite) hacía al robot vulnerable a ser flanqueado por oponentes más ágiles.
Aprendizajes
Esta experiencia demostró que la fuerza bruta por sí sola no es suficiente en la élite. Fue un aprendizaje clave sobre el 'meta-juego' competitivo: un diseño hiper-especializado en fuerza puede ser neutralizado por la agilidad, demostrando que el equilibrio óptimo entre torque y velocidad es fundamental.